Download
1 / 17
170 likes | 411 Vues
Si vuole confrontare tramite simulazione i diversi algoritmi di inversione differenziale della cinematica Si supponga di avere un manipolatore planare a tre bracci di lunghezza 0.5 m La postura iniziale sia q 0 = [ p -p/2 -p/2 ] T corrispondente nello spazio operativo a [0 0.5] T

E N D
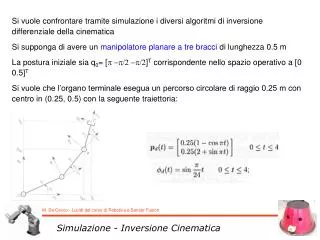
Si vuole confrontare tramite simulazione i diversi algoritmi di inversione differenziale della cinematica Si supponga di avere un manipolatore planare a tre bracci di lunghezza 0.5 m La postura iniziale sia q0= [p -p/2 -p/2]T corrispondente nello spazio operativo a [0 0.5]T Si vuole che l’organo terminale esegua un percorso circolare di raggio 0.25 m con centro in (0.25, 0.5) con la seguente traiettoria: Simulazione - Inversione Cinematica
La postura iniziale sia q0= [p -p/2 -p/2]T corrispondente nello spazio operativo a [0 0.5]T Si vuole che l’organo terminale esegua un percorso circolare di raggio 0.25 m con centro in (0.25, 0.5) con la seguente traiettoria: 0.5 m Simulazione - Inversione Cinematica
Blocco di pianificazione traiettoria: Simulazione – Catena Aperta
Blocco di Cinematica diretta: Simulazione – Catena Aperta
NOTA: occorre definire la condizione iniziale [pi –pi/2 –pi/2] dell’integratore come un vettore altrimenti le compatibilità dimensionali non vengono verificate Simulazione – Catena Aperta
Blocco di Inversione Jacobiano: function Jinv = JacobianoINV(q) a1 = 0.5; a2 = 0.5; a3 = 0.5; J = [ (-a1*sin(q(1))-a2*sin(q(1)+q(2))-a3*sin(q(1)+q(2)+q(3))) (-a2*sin(q(1)+q(2))-a3*sin(q(1)+q(2)+q(3))) (-a3*sin(q(1)+q(2)+q(3))); ... (a1*cos(q(1)) + a2*cos(q(1)+q(2)) + a3*cos(q(1)+q(2)+q(3))) (a2*cos(q(1)+q(2)) + a3*cos(q(1)+q(2)+q(3))) (a3*cos(q(1)+q(2)+q(3))); ... 1 1 1]; Jinv = J^-1; Simulazione – Catena Aperta
Si nota uno scostamento circa progressivo tra la traiettoria desiderata e quella eseguita in simulazione Risultati della Simulazione – Catena Aperta
Si nota un SALTO!!! … dovuto allo Jacobiano che si è avvicinato troppo allo zero! Risultati della Simulazione – Catena Aperta
Cosa succede in corrispondenza del salto? Primo: -250° Secondo: 0° Terzo: 219° Risultati della Simulazione – Catena Aperta
Si simuli adesso il metodo di integrazione basato sulla retroazione dall’errore nello spazio operativo e Jacobiano trasposto Si consideri come prima ipotesi: Simulazione – Catena Chiusa
Si noti che non ci sono più le operazioni di: • inversione dello Jacobiano • derivazione della traiettoria Simulazione – Catena Chiusa
Si simuli adesso il metodo di integrazione basato sulla retroazione dall’errore nello spazio operativo e Jacobiano inverso Simulazione – Catena Chiusa