
Rotational Dynamics: Moment of Inertia, Torque, and Angular Momentum
E N D
Presentation Transcript
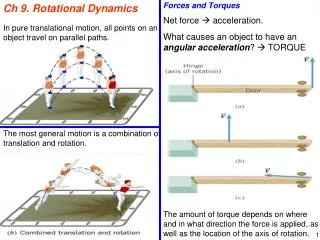
Chapter 9 Rotational Dynamics
Rotational kinetic energy • We consider a system of particles participating in rotational motion • Kinetic energy of this system is • Then
Moment of inertia • From the previous slide • Defining moment of inertia (rotational inertia) as • We obtain for rotational kinetic energy
Moment of inertia: rigid body • There is a major difference between moment of inertia and mass: the moment of inertia depends on the quantity of matter, its distribution in the rigid object and also depends upon the location of the axis of rotation • For a rigid body the sum is calculated over all the elements of the volume • This sum can be calculated for different shapes and density distributions • For a constant density and the rotation axis going through the center of mass the rotational inertia for common body shapes are well known
Moment of inertia: rigid body • The rotational inertia of a rigid body depends on the position and orientation of the axis of rotation relative to the body
Moment of inertia: rigid body • Example: moment of inertia of a uniform ring • The hoop is divided into a number of small segments, m1 …, which are equidistant from the axis
Chapter 9 Problem 39 A particle is located at each corner of an imaginary cube. Each edge of the cube is 0.25 m long, and each particle has a mass of 0.12 kg. What is the moment of inertia of these particles with respect to an axis that lies along one edge of the cube?
Torque • The door is free to rotate about an axis through O • Three factors that determine the effectiveness of the force in opening the door: 1) The magnitude of the force 2) The position of the application of the force 3) The angle at which the force is applied
Torque • We apply a force at point P to a rigid body that is free to rotate about an axis passing through O • Only the tangential component Ft = F sin φ of the force will be able to cause rotation
Torque • The ability to rotate will also depend on how far from the rotation axis the force is applied • Torque (turning action of a force): • SI unit: N*m (don’t confuse with J)
Torque • Torque: • Moment arm (lever arm):r┴= r sinφ • Torque can be redefined as: force times moment arm τ = F r┴
Torque • Torque is the tendency of a force to rotate an object about some axis • Torque is a vector • The direction is perpendicular to the plane determined by the position vector and the force • If the turning tendency of the force is CCW (CW), the torque will be positive (negative)
Torque • When two or more torques are acting on an object, they are added as vectors • The net torque is the sum of all the torques produced by all the forces If the net torque is zero, the object’s rate of rotation doesn’t change • Forces cause accelerations, whereas torques cause angular accelerations
Newton’s Second Law for rotation • Consider a particle rotating under the influence of a force • For tangential components • Similar derivation for rigid body
Chapter 9 Problem 34 A ceiling fan is turned on and a net torque of 1.8 N m is applied to the blades. The blades have a total moment of inertia of 0.22 kg m2. What is the angular acceleration of the blades?
Center of mass • The force of gravity acting on an object must be considered • In finding the torque produced by the force of gravity, all of the weight of the object can be considered to be concentrated at a single point • We wish to locate the point of application of the single force whose magnitude is equal to the weight of the object, and whose effect on the rotation is the same as all the individual particles • This point is called the center of mass of the object
Center of mass • In a certain reference frame we consider a system of particles, each of which can be described by a mass and a position vector • For this system we can define a center of mass:
Center of mass of two particles • A system consists of two particles on the x axis • Then the center of mass is
Center of mass of a rigid body • For a system of individual particles we have • For a rigid body (continuous assembly of matter) the sum is calculated over all the elements of the volume
Angular momentum • Angular momentum: • SI unit: kg*m2/s • Recall:
Conservation of angular momentum • Newton’s Second Law for rotational motion • If the net torque acting on a system is zero, then • If no net external torque acts on a system of particles, the total angular momentum of the system is conserved (constant)
Chapter 9 Problem 63 A thin rod has a length of 0.25 m and rotates in a circle on a frictionless tabletop. The axis is perpendicular to the length of the rod at one of its ends. The rod has an angular velocity of 0.32 rad/s and a moment of inertia of 1.1 × 10-3 kg m2. A bug standing on the axis decides to crawl out to the other end of the rod. When the bug (mass = 4.2 × 10-3 kg) gets where it’s going, what is the angular velocity of the rod?
Equilibrium • Equilibrium: • Static equilibrium: • Stable equilibrium: the body returns to the state of static equilibrium after having been displaced from that state • Unstable equilibrium: the state of equilibrium is lost after a small force displaces the body
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the CM) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the CM) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the CM) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the CM) and its direction relative to the possible point(s) of rotation
The requirements of equilibrium • For an object to be in equilibrium, we should have two requirements met • Balance of forces: the vector sum of all the external forces that act on the body is zero • Balance of torques: the vector sum of all the external torques that act on the body, measured about any possible point, is zero
Equilibrium: 2D case • If an object can move only in 2D (xy plane) then the equilibrium requirements are simplified: • Balance of forces: only the x- and y-components are considered • Balance of torques: only the z-component is considered (the only one perpendicular to the xy plane)
Chapter 9 Problem 25 A 1220-N uniform beam is attached to a vertical wall at one end and is supported by a cable at the other end. A 1960-N crate hangs from the far end of the beam. Find (a) the magnitude of the tension in the wire and (b) the magnitudes of the horizontal and vertical components of the force that the wall exerts on the left end of the beam.
Indeterminate structures • Indeterminate systems cannot be solved by a simple application of the equilibrium conditions • In reality, physical objects are not absolutely rigid bodies • Concept of elasticity is employed