Rotational Dynamics
Rotational Dynamics. Torque & Rotational Kinematics. Presentation 2003 R. McDermott. Torque. Torque is the rotational equivalent of force Force tends to cause linear acceleration Torque tends to cause rotational acceleration Occurs when forces do not meet at a point (non-concurrent forces).


Rotational Dynamics
E N D
Presentation Transcript
Rotational Dynamics Torque & Rotational Kinematics Presentation 2003 R. McDermott
Torque • Torque is the rotational equivalent of force • Force tends to cause linear acceleration • Torque tends to cause rotational acceleration • Occurs when forces do not meet at a point (non-concurrent forces)
Example: Lever • A simple lever is the easiest example of non-concurrent forces:
The Lever • The up and down forces balance, so no linear acceleration occurs • The support force causes no rotation • The force on one side is larger than on the other, so rotation will occur (and there will be acceleration as well)
See-Saw • But what about the situation below? • We all recognize that rotation may not occur in the case below, even though the forces on the ends are not equal. • Why?
Force and Positioning • Linear acceleration is only concerned with the size of competing forces • Torque is concerned with the size of competing forces AND their position with respect to the pivot point • A smaller force offset by a greater distance can have the same effect as a large force at a smaller offset
F d Definition: • T = Fdsin • Like the work definition, but with a different trig function • Cross-product, not dot-product • Another way of multiplying vectors • Multiplying only perpendicular components Fsin
15N 5N 10N 4m 1m Sample #1: • Each force is perpendicular to the measured distance from the pivot point • The 15N force is located 0m from the pivot point, so its torque is 0m x 15N = 0 m-N
15N 5N 10N 4m 1m Sample: • The 10N force is located 1m from the pivot point, so its torque is 1m x 10N = 10m-N • The 5N force is located 4m from the pivot point, so its torque is 4m x 15N = 20m-N • But these act in opposite directions
15N 5N 10N 4m 1m Sample (cont): • The 10N force would rotate the board clockwise • The 5N force would rotate the board counterclockwise • Overall then, we have 20m-N counterclockwise and 10m-N clockwise, which equals 10m-N counterclockwise
Rotation “Speed” • Most people would agree that the objects above are spinning at the same “speed”. • But what is meant by that?
Rotation and Period • When we say two objects are rotating at the same speed, we usually mean that they complete one rotation in the same amount of time – Have the same period. • A point on the rim of the larger object, however, has farther to travel and must actually have a greater velocity than a point on the rim of the smaller object.
Then What is the Same? • When we refer to rotational speed, we are actually referring to an angular speed. • We are rotating through some angle each second, not some distance each second. • The “natural” way to measure angles is by using the radian – an arc length equal to the radius of rotation.
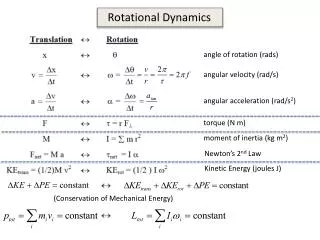
Linear: x in meters v in meters/sec a in meters/sec2 F in Newtons m in kilograms Angular: in radians in radians/sec in radians/sec2 in meter-Newtons in kilogram-meters2 Linear Versus Angular
Conversions: • x = r A point on the rim of an object of radius 2m that rotates through an angle of 2 radians travels a distance of 4 meters. • v = r If the same object has an angular velocity of 3 rad/s, a point on the rim has a velocity of 6 m/s. • a = r If this object is increasing its angular velocity by 1 rad/s every second, then the acceleration of that same point would be 2 m/s2
Linear: Vavg = x/t a = v/t Vf = Vi + at Vf2 = Vi2 + 2ax x = Vit + ½at2 Angular: avg = /t = /t f =i + t f2=i2 + 2 = it + ½t2 Kinematics Equations: