Download
1 / 14
190 likes | 1.01k Vues
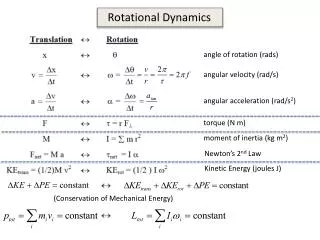
Rotational Dynamics Continued. Translation-Rotation Analogues & Connections. Translation Rotation Displacement x θ Velocity v ω Acceleration a α Force (Torque) F τ Mass (moment of inertia) m I Newton’s 2 nd Law ∑ F = ma ∑τ = I α

E N D
Translation-Rotation Analogues & Connections Translation Rotation Displacement x θ Velocity v ω Acceleration a α Force (Torque) F τ Mass (moment of inertia) m I Newton’s 2nd Law ∑F = ma ∑τ = Iα Kinetic Energy (KE) (½)mv2(½)Iω2 Work (constant F) Fd ? CONNECTIONS: v = rω, atan= rα aR = (v2/r) = ω2r , τ = rF , I = ∑(mr2)
Work Done by a Constant Torque Torque: τ =Fr Work: W = F = Frτ = ττ
Translation-Rotation Analogues & Connections Translation Rotation Displacement x θ Velocity v ω Acceleration a α Force (Torque) F τ Mass (moment of inertia) m I Newton’s 2nd Law ∑F = ma ∑τ = Iα Kinetic Energy (KE) (½)mv2(½)Iω2 Work (constant F,τ) Fd τθ Momentum mv ? CONNECTIONS: v = rω, atan= rα aR = (v2/r) = ω2r , τ = rF , I = ∑(mr2)
Angular Momentum • Define:Angular Momentum of rotating body (moment of inertia I, angular velocity ω): L Iω(kg m2/s) • Recall, general Newton’s 2nd Law: ∑F = (p/t) (= ma) if ∑F = 0, (p/t) = 0 & p = constant Momentum is conserved if the total force = 0 (collisions!)
Angular MomentumL Iω • Similar to momentum case, can show, rotational version of Newton’s 2nd Law: ∑τ = (L/t) (= Iα) if ∑τ = 0, (L/t) = 0 & L = constant Angular Momentum is conserved if total torque = 0 • Example: t = 0, angular velocity ω0time t, angular velocity ω L = L0or Iω = I0ω0 Change moment of inertia from I0to I by changing the body’s shape!
Conservation of Angular Momentum means: • So, if an object’s moment of inertia changes, its angular speed also must change! • Example • Ice skater:L Iω • But I = ∑(mr2) • Iω = I0ω0
Conservation of Angular Momentum means: I2ω2 • So, if an object’s moment of inertia changes, its angular speed also must change! • Example • Diver:L Iω • But I = ∑(mr2) • Iω = constant I1ω1 I3ω3 I4ω4 Center of Mass So, I1ω1 =I2ω2 =I3ω3 =I4ω4
Example:An object rotating on a string of changing length. A small mass m is attached to the end of a string. It revolves in a circle on a frictionless tabletop. The other end of the string passes through a hole in the table. Initially, it revolves with a speed v1 = 2.4 m/s in a circle of radius r1 = 0.80 m. The string is pulled slowly through the hole so that the radius is reduced to r2 = 0.48 m. What is the new speed, v2, of the mass? v1 = 2.4 m/s, r1 = 0.8m, r2 = 0.48 m, v2 = ? Solution:Conservation of Angular Momentum So, L = I1ω1 = I2ω2 or m(r1)2ω1 = m(r2)2ω2 Giving ω2 = ω1 (r2)2/(r1)2 , ω1 = (v1/r1) And v2 = r2ω2 = r2(v1/r1)[(r2)2/(r1)2] = v1 (r1/r2) So, v2 = 4.0 m/s
Angular Quantities are Vectors! The defined direction of the angular velocity vector ω is to the plane of rotation. The vector directions of the angular acceleration α and the angular momentum L = Iωare similarly to the rotation Plane. The direction of these vectors is given by the “Right-Hand Rule”.
Conservation of Vector Angular Momentum L = Iω so the vector direction of L is parallel to the direction of the vectorω. Consider a person walking on a rotating platform, as shown. The total angular momentum of the person + the platform = 0, so we must have Lperson + Lplatform = 0. That is the angular momenta are two vectors that add to zero, so they are equal in size & opposite in direction.
Conceptual Example 8-17: The “Rotating Professor”! Conservation of angular momentum!! Linitial = Lfinal L = - L + Lperson Lperson = 2 L Demonstration!
Translation-Rotation Analogues & Connections Translation Rotation Displacement x θ Velocity v ω Acceleration a α Force (Torque) F τ Mass (moment of inertia)m I Newton’s 2nd Law ∑F = ma ∑τ = Iα Kinetic Energy (KE) (½)mv2 (½)Iω2 Work (constant F,τ) Fd τθ Momentum mv Iω CONNECTIONS: v = rω, atan= rα aR = (v2/r) = ω2r , τ = rF , I = ∑(mr2)
Another “Rotating Professor”! Demonstration!!