Lunar Exploration Transportation System (LETS) - Team Frankenstein Final Review Presentation
180 likes | 312 Vues
The Team Frankenstein's final review presentation for the Lunar Exploration Transportation System (LETS) focuses on the design and operational aspects of their proposal for lunar exploration. The presentation, led by team leader Matt Isbell, covers critical areas such as Guidance Navigation and Control (GN&C), power systems, payload communications, and structural design. Key team members, representing The University of Alabama in Huntsville and Southern University, outline their innovative solutions, including the Cyclops descent vehicle and sample return mechanisms for effective lunar exploration.

Lunar Exploration Transportation System (LETS) - Team Frankenstein Final Review Presentation
E N D
Presentation Transcript
Lunar Exploration Transportation System (LETS) MAE 491 / 492 2008 IPT Design Competition Instructors: Dr. P.J. Benfield and Dr. Matt Turner Team Frankenstein Final Review Presentation 4/29/08
Team Disciplines • The University of Alabama in Huntsville • Team Leader: Matt Isbell • Structures: Matthew Pinkston and Robert Baltz • Power: Tyler Smith • Systems Engineering: Kevin Dean • GN&C: Joseph Woodall • Thermal: Thomas Talty • Payload / Communications: Chris Brunton • Operations: Audra Ribordy • Southern University • Mobility: Chase Nelson and Eddie Miller • ESTACA • Sample Return: Kim Nguyen and Vincent Tolomio
Agenda • GN&C • Communications • Payload • Power • Thermal • Conclusions • Questions • Project Office • Systems Engineering • The Need • The Requirements • The Solution • Performance • Operations • Structures
The Solution 1) Attached to the attitude control system, Cyclops starts descent 2) Penetrators are dispersed into Shackleton Crater 3-4) Cyclops continues descent 5) Cyclops lands outside Shackleton Crater • Attitude control system detaches from Cyclops 7) Cyclops drops off single site box, receives data from the penetrators, then begins to rove
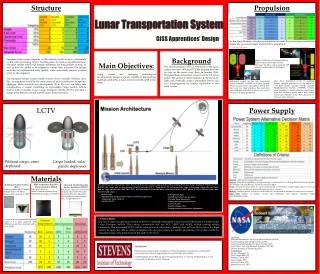
Before Deployment Structures • Materials • Aluminum 6061 – T6 • Carbon Fiber Composite • System Specifications (Main) • 6 Wheel Rocker Bogie Mobility System • 13 in. Outer Diameter Wheels (Aluminum Construction-6061 T6) • Aluminum construction (6061 T6) • Maxon EC 60 Brushless DC motor (60mm) x 6 • Single Site Box • Max Width-60.793 in. • Max Length-27.09 in. • Max Height- 14 in. • Sample Return Vehicle • Max Diameter- 9 in. • Max Height- 13 in. • Camera • Dimensions- 12 x 8 x 6 • Main Chassis • Dimensions- 60.793 x 60.793 x 14 in. • Aluminum Frame • Carbon composite exterior • MLI Insulation • Scoop Arm • Max Reach- 68in. After Deployment