Monotone Submodular Max with Matroid Constraints
470 likes | 512 Vues
Monotone Submodular Max with Matroid Constraints. Lecture 1.2. Matroid constraints. Independent System and Matroid. Independent System. Consider a finite set S and a collection of subsets of S. ( S , ) is called an independent system if. i.e., it is hereditary.

Monotone Submodular Max with Matroid Constraints
E N D
Presentation Transcript
Monotone Submodular Max with Matroid Constraints Lecture 1.2
Independent System • Consider a finite set S and a collection of subsets of S. (S,) is called an independent system if i.e., it is hereditary. Each subset in is called an independent set.
Maximization + • c: E→R max c(A) s.t. Aε • c(A) = ΣxεAc(x)
Maximum Weight Hamiltonian Cycle • Given an edge-weighted complete graph, find a Hamiltonian cycle with maximum total weight.
Independent sets • E = {all edges} • A subset of edges is independent if it is a Hamiltonian cycle or a vertex-disjoint union of paths.
Maximal Independent Sets • Consider a subset F of edges. For any two maximal independent sets I and J of F, |J| < 2|I|
Maximum Weight Directed Hamiltonian Cycle • Given an edge-weighted complete digraph, find a Hamiltonian cycle with maximum total weight.
Independent sets • E = {all edges} • A subset of edges is independent if it is a directed Hamiltonian cycle or a vertex-disjoint union of directed paths.
Tightness ε 1 1 1 1+ε
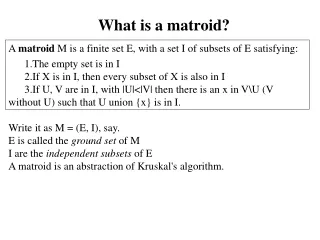
Matroid • An independent system (E,C) is called a matroid if for any subset F of E, u(F)=v(F). Theorem An independent system (E,C) is a matroid iff for any cost function c( ), the greedy algorithm MAX gives a maximum solution.
Theorem • Every independent system is an intersection of several matroids.
circuit • A minimal dependent set is called a circuit. • Let A1, …, Ak be all circuits of independent system (E,C). • Let
Theorem • If independent system (E,C) is the intersection of k matroids (E,Ci), then for any subset F of E, u(F)/v(F) < k.
Applications • Many combinatorial optimization problem can be represented as an intersection of matrods. (see Lawler: Combinatorial Optimization and Matroid.)
Greedy Approximation Theorem 1
Application: An example Submodular Max with Group Budget Constrants
Matching • In a bipartite graph, all matching do not form a matroid. They form the intersection of two matroids. • This example shows that disjointness of groups is important for group budget constraints to give a matroid.
Analysis 1 2 3 4 5 1* 2* 3* 4* 5*
Greedy • Greedy algorithm gives a polynomial-time ½-approximation for max set-coverage with group budget constraints. • This is the best possible for greedy algorithm. • To obtain (1-1/e)-approximation, other techniques have to be used.
智能 天网系统展示人脸识别能力,靠一张照片 Coverage of Camera Sensors
Parameters for a camera sensor Sensing Angle Sensing radius Sensing direction
Max Camera Sensor Coverage • Given a set of camera sensors and a set of target points, find k camera sensors covering maximum number of targets.