Team Aluminum Falcon
250 likes | 271 Vues
Team Aluminum Falcon. About the Team. Students Jeremy Childers Cory Sutyak Jake Davis Matt Gain Mitchell Bandish Lauden Sullivan Chris Price. Non-Students Dave Papania Dean Wadd Nick Pasqualone Scot Fyffe. About CRT. Our sponsor was Component Repair Technologies.

Team Aluminum Falcon
E N D
Presentation Transcript
About the Team Students • Jeremy Childers • Cory Sutyak • Jake Davis • Matt Gain • Mitchell Bandish • Lauden Sullivan • Chris Price Non-Students Dave Papania Dean Wadd Nick Pasqualone Scot Fyffe
About CRT • Our sponsor was Component Repair Technologies. • They are located at 8507 Tyler Blvd. Mentor, OH 44060 • Founded in 1985 as a global provider of turbine engine component repair. • Their motto is “Trust and fairness.” • They are known worldwide for their quality & responsive service.
The Intent of the Design • At the beginning everyone had their own ideas for the bot, ranging from swinging weapons, tethered projectiles as well as blimps. • Conceptually, we agreed to have a very fast, wedge shaped bot with an overall goal to flip opponents.
Research & Development • The majority of our research was split into two parts, determining how we're going to flip and how to increase our speed.
Research & Development -Motors • Through our research, we eventually decided to swap out the stock motors with 2 Sidewinders from Castle Creations. • Brushless motor system • Weight of 9.2 oz • ESC: 1.9” length 1.4” width 0.8” height
Research & Development - Motors • Unfortunately, we made a fatal flaw when we did our research. • By choosing a brushless motor system, we didn't realize that while we would have superior speed, we would not have maneuverability. • This is due to the fact that brushless motor systems aren't designed to easily go forward and backwards in an instant. • We feared that we would burn out the motors.
Research & Development -Motors • We went back to the drawing board for a better solution while keeping the motors for possible inspiration in the future. • In the end, we decided to increase the gear ratio while using the stock motors that came with the kit. • Our speed was almost doubled as a result.
Research & Development - Flipping • While we were researching different motors, we were concurrently researching different flipping methods. • In the beginning we all wanted to use a pneumatic system, the only question was how it would be done. • We spent a few months researching just the specifications and how we could use what we were allowed to have.
Research & Development - Flipping • Eventually, we decided on a pneumatic punch. • While we understood what it was that we wanted to do, we were unsure how to do it. • Thankfully, Dave, our head Engineer was able to draw up a schematic for Scot to machine. • The name “Aluminum Falcon” is a reference to said punch, not from the Adult Swim show “Robot Chicken” like so many people assume.
Research & Development - Flipping • As seen in the picture, the power block as we called it holds 6 standard co2 cartridges in a circular fashion. • Once upward force is enacted upon the bottom layer, the co2 cartridges are punctured by pins on the top layer, causing them to release air into a holding tank inside the top layer. • The block itself worked incredibly, surpassing expectations.
Research & Development - Flipping • However, we ran into complications during testing. • Basically, the large amount of condensed co2 froze the tubing and some of the regulators. • This caused the piping to burst and the regulators to stop working. • The testing for this occurred approximately 2-3 weeks before the competition, giving us very little time to hit the drawing board.
Research & Design- A New Approach • Against time, we took another look at the sidewinder motors we still had. • While we did not use those motors specifically, they paved the way for the weapons system that we decided to use. • Our new design would use a single motor to drive a belt that is attached to a shaft to spin a blade.
Research & Design- A New Approach • The motor that's driving the shaft is a bit stronger than the Sidewinders. • We decided to go with the Mamba Monster. • The Mamba Monster is able to hit 60 mph on RC cars. • It also came with software to allow us to manipulate throttle curves.
The Time Crunch • The past few weeks were easily the most strenuous for the team. • We understood how little time we had and we didn't waste any of it. • The team is proud to say that we were able to get a quality competitor out there with the limited time that we had to re-create a bot due to the pneumatics malfunctioning.
Testing • Due to the fact that the majority of the time we had was attributed to the pneumatics model, we unfortunately did not have as much time to test out the blade concept as much as we would have liked. • That isn't to say we didn't get to test the blade. The tests we did run on it allowed us to see problems with the system and allowed us to fix them.
Testing • Most of the testing came in the form of the strength of the blade. Our original holes we had in it to reduce weight were too big, as we tested we learned that it started to warp. THE OLD BLADE THE NEW BLADE
Testing • We also tested to see how fast we wanted the blade to spin. • The motor is rated to be able to go 60000 rpm. • But, we decided to tone that down because it consumed too much power.
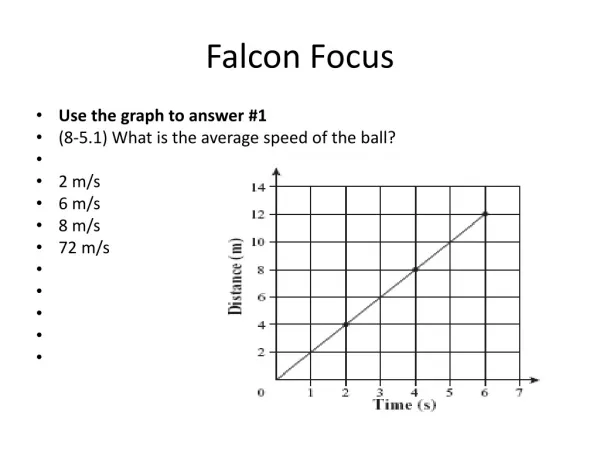
Testing Here is an example of the graphing software we used that allowed us to control throttle curves. *Note, these are not our actual data, merely a demonstration of the software we used.
Testing • Through the testing we also found out that the belt that drove the motor to the shaft was easily stretched. To solve this we got more belts. • Also, during testing our ESC for the blade died on us two days before the competition, luckily we caught it then and not the day of the competition.
How it All Works • Our strategy with this design is to have a strong defense by having a strong offense. • We have drop offs from the blade to create more hitting surface area as well as create a protective barrier around the bot. • We used ramps on the sides because of the fact that our blade is powered by brushless motors. • Those ramps act like a barrier for the blade, because if the blade were to hit a wall, it could burn itself out.
How it All Works • The ramps are also there for bots that would normally be too low for us to hit. • We are using two separate batteries in our design. One, the stock battery that came with the kit, powers the motors. • The other battery is dedicated to the blade motor. • The right joystick on the controller controls the speed of the blade.
The Experience • Overall the competition was a positive success. • A lot was learned, a lot of time was committed, and a lot of fun was had. • There were disagreements within the team on numerous aspects of the bot, but that was to be expected and we eventually worked everything out. • The program taught us a lot about the engineering process, teamwork, manufacturing, as well as a bit of aeronautical turbines.