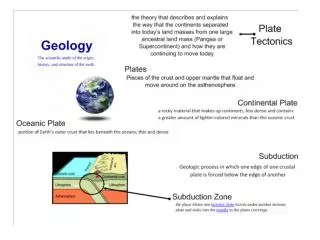
A Convergent Solution to Tensor Subspace Learning
A Convergent Solution to Tensor Subspace Learning. Tensor Subspace Learning . Concept. Tensor: multi-dimensional (or multi-way) arrays of components . Tensor Subspace Learning . Application. real-world data are affected by multifarious factors.


A Convergent Solution to Tensor Subspace Learning
E N D
Presentation Transcript
Tensor Subspace Learning . Concept • Tensor: multi-dimensional (or multi-way) arrays of components Concept
Tensor Subspace Learning . Application • real-world data are affected by multifarious factors for the person identification, we may have facial images of different ► views and poses ► lightening conditions ► expressions ► image columns and rows • the observed data evolve differently along the variation of different factors Application
Tensor Subspace Learning . Application • it is desirable to dig through the intrinsic connections among different affection factors of the data. • Tensor provides a concise and effective representation. Images Image columns expression pose Image rows Illumination Application
Traditional Tensor Discriminant algorithms • Two-dimensional Linear Discriminant Analysis Ye et.al • Discriminant Analysis with Tensor Representation Yan et.al • Tensor Subspace Analysis He et.al • project the tensor along different dimensions or ways • solve an trace ratio optimization problem • projection matrices for different dimensions are derived iteratively • DO NOT CONVERGE ! Tensor Subspace Learning algorithms
Graph Embedding – a general framework • An undirected intrinsic graph G={X,W} is constructed to represent the pairwise similarities over sample data. • A penalty graph or a scale normalization item is constructed to impose extra constraints on the transform. penalty graph intrinsic graph Tensor Subspace Learning algorithms
Discriminant Analysis Objective • No closed form solution Solve the projection matrices iteratively: leave one projection matrix as variable while keeping others as constant. Mode-k unfolding of the tensor
Discriminant Analysis Objective Trace Ratio: General Formulation for the objectives of the Discriminant Analysis based Algorithms. Between Class Scatter of the unfolded data Within Class Scatter of the unfolded data DATER: Constructed from Image Manifold TSA: Diagonal Matrix with weights Objective Deduction
Why do previous algorithms not converge? GEVD The conversion from Trace Ratio to Ratio Trace induces an inconsistency among the objectives of different dimensions! Disagreement between the Objective and the Optimization Process
What will we do? from Trace Ratio to Trace Difference Objective: Trace Ratio Trace Difference Define Find So that Then from Trace Ratio to Trace Difference
What will we do? from Trace Ratio to Trace Difference Thus Constraint Let The Objective rises monotonously! Where are the leading eigen vectors of . Projection matrices of different dimensions share the same objective We have from Trace Ratio to Trace Difference
Highlights of our algorithm • The objective value is guaranteed to monotonously increase; and the multiple projection matrices are proved to converge. • Only eigenvalue decomposition method is applied for iterative optimization, which makes the algorithm extremely efficient. • The algorithm does not suffer from the singularity problem that is often encountered by the traditional generalized eigenvalue decomposition method used to solve the ratio trace optimization problem. • Enhanced potential classification capability of the derived low-dimensional representation from the subspace learning algorithms. Hightlights of the Trace Ratio based algorithm
Experimental Results The traditional ratio trace based procedure does not converge, while our new solution procedure guarantees the monotonous increase of the objective function value and commonly our new procedure will converge after about 4-10 iterations.Moreover, the final converged value of the objective function from our new procedure is much larger than the value of the objective function for any iteration of the ratio trace based procedure. Monotony of the Objective
Experimental Results The projection matricesconverge after 4-10 iterations for our new solution procedure; while for the traditional procedure, heavy oscillationsexist and the solution does not converge. Convergency of the Projection Matrices
Experimental Results 1. TMFA TR mostly outperforms all the other methods concerned in this work, with only one exception for the case G5P5 on the CMU PIE database. 2. For vector-based algorithms, the trace ratio based formulation is consistently superior to the ratio trace based one for subspace learning. 3. Tensor representation has the potential to improve the classification performance for both trace ratio and ratio trace formulations of subspace learning. Face Recognition Results
Summary • A novel iterative procedure was proposed to directly optimize the objective function of general subspace learning based on tensor representation. • The convergence of the projection matrices and the monotony property of the objective function value were proven. • The first work to give a convergent solution for the general tensor-based subspace learning. Summary