Recap from last time: live variables
440 likes | 480 Vues
This text recaps the concepts of live variables and backward analyses in programming, discussing the precision and potential loss of precision in constant propagation. It also explores unreachable code, path-sensitivity issues, and the meet-over-all-paths (MOP) concept. The relationship between MOP and dataflow analysis is examined, along with distributive problems and program representations.

Recap from last time: live variables
E N D
Presentation Transcript
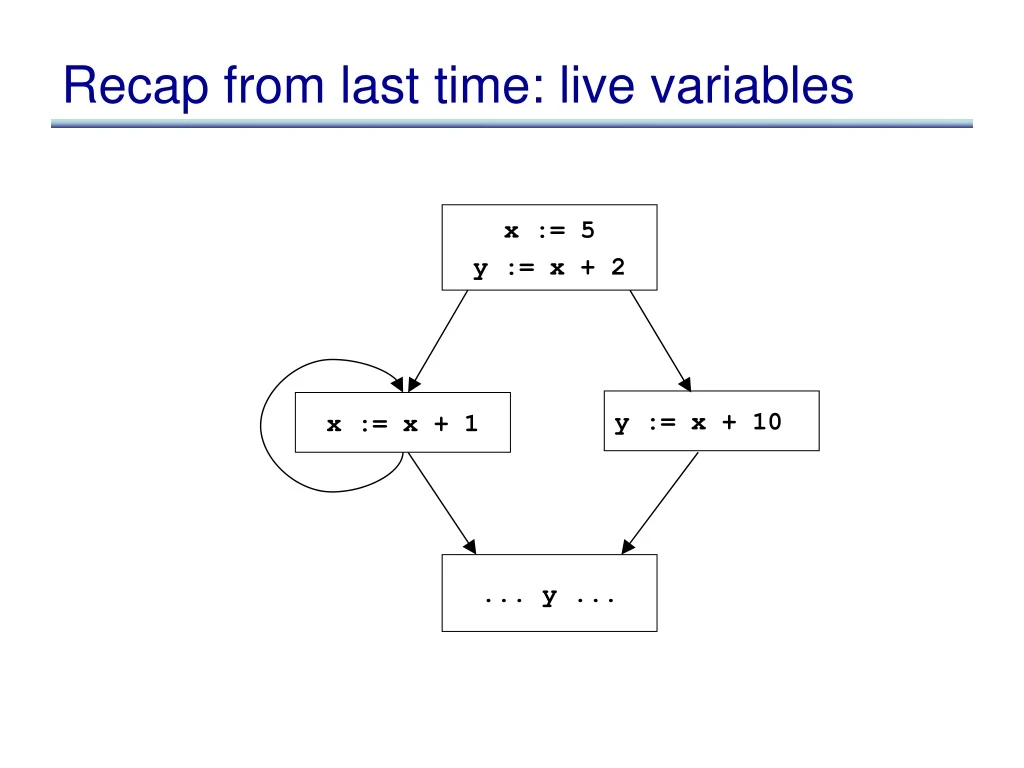
Recap from last time: live variables x := 5 y := x + 2 y := x + 10 x := x + 1 ... y ...
Revisiting assignment in Fx := y op z(out) = out – { x } [ { y, z} x := y op z out
Theory of backward analyses • Can formalize backward analyses in two ways • Option 1: reverse flow graph, and then run forward problem • Option 2: re-develop the theory, but in the backward direction
Precision • Going back to constant prop, in what cases would we lose precision?
Precision • Going back to constant prop, in what cases would we lose precision? if (...) { x := -1; } else x := 1; } y := x * x; ... y ... if (p) { x := 5; } else x := 4; } ... if (p) { y := x + 1 } else { y := x + 2 } ... y ... x := 5 if (<expr>) { x := 6 } ... x ... where <expr> is equiv to false
Precision • The first problem: Unreachable code • solution: run unreachable code removal before • the unreachable code removal analysis will do its best, but may not remove all unreachable code • The other two problems are path-sensitivity issues • Branch correlations: some paths are infeasible • Path merging: can lead to loss of precision
MOP: meet over all paths • Information computed at a given point is the meet of the information computed by each path to the program point if (...) { x := -1; } else x := 1; } y := x * x; ... y ...
MOP • For a path p, which is a sequence of statements [s1, ..., sn] , define: Fp(in) = Fsn( ...Fs1(in) ... ) • In other words: Fp = • Given an edge e, let paths-to(e) be the (possibly infinite) set of paths that lead to e • Given an edge e, MOP(e) = • For us, should be called JOP...
MOP vs. dataflow • As we saw in our example, in general,MOP dataflow • In what cases is MOP the same as dataflow? Dataflow MOP x := -1; y := x * x; ... y ... x := 1; y := x * x; ... y ... x := -1; x := 1; Merge y := x * x; ... y ... Merge
MOP vs. dataflow • As we saw in our example, in general,MOP dataflow • In what cases is MOP the same as dataflow? • Distributive problems. A problem is distributive if: 8 a, b . F(a t b) = F(a) t F(b)
Summary of precision • Dataflow is the basic algorithm • To basic dataflow, we can add path-separation • Get MOP, which is same as dataflow for distributive problems • Variety of research efforts to get closer to MOP for non-distributive problems • To basic dataflow, we can add path-pruning • Get branch correlation • To basic dataflow, can add both: • meet over all feasible paths
Representing programs • Goals
Representing programs • Primary goals • analysis is easy and effective • just a few cases to handle • directly link related things • transformations are easy to perform • general, across input languages and target machines • Additional goals • compact in memory • easy to translate to and from • tracks info from source through to binary, for source-level debugging, profilling, typed binaries • extensible (new opts, targets, language features) • displayable
Option 1: high-level syntax based IR • Represent source-level structures and expressions directly • Example: Abstract Syntax Tree
Translate input programs into low-level primitive chunks, often close to the target machine Examples: assembly code, virtual machine code (e.g. stack machines), three-address code, register-transfer language (RTL) Standard RTL instrs: Option 2: low-level IR
Comparison • Advantages of high-level rep • analysis can exploit high-level knowledge of constructs • easy to map to source code (debugging, profiling) • Advantages of low-level rep • can do low-level, machine specific reasoning • can be language-independent • Can mix multiple reps in the same compiler
Components of representation • Control dependencies: sequencing of operations • evaluation of if & then • side-effects of statements occur in right order • Data dependencies: flow of definitions from defs to uses • operands computed before operations • Ideal: represent just those dependencies that matter • dependencies constrain transformations • fewest dependences ) flexibility in implementation
Control dependencies • Option 1: high-level representation • control implicit in semantics of AST nodes • Option 2: control flow graph (CFG) • nodes are individual instructions • edges represent control flow between instructions • Options 2b: CFG with basic blocks • basic block: sequence of instructions that don’t have any branches, and that have a single entry point • BB can make analysis more efficient: compute flow functions for an entire BB before start of analysis
Control dependencies • CFG does not capture loops very well • Some fancier options include: • the Control Dependence Graph • the Program Dependence Graph • More on this later. Let’s first look at data dependencies
Data dependencies • Simplest way to represent data dependencies: def/use chains
Def/use chains • Directly captures dataflow • works well for things like constant prop • But... • Ignores control flow • misses some opt opportunities since conservatively considers all paths • not executable by itself (for example, need to keep CFG around) • not appropriate for code motion transformations • Must update after each transformation • Space consuming
SSA • Static Single Assignment • invariant: each use of a variable has only one def
SSA • Create a new variable for each def • Insert pseudo-assignments at merge points • Adjust uses to refer to appropriate new names • Question: how can one figure out where to insert nodes using a liveness analysis and a reaching defns analysis.
Converting back from SSA • Semantics of x3 := (x1, x2) • set x3 to xi if execution came from ith predecessor • How to implement nodes?
Converting back from SSA • Semantics of x3 := (x1, x2) • set x3 to xi if execution came from ith predecessor • How to implement nodes? • Insert assignment x3 := x1 along 1st predecessor • Insert assignment x3 := x2 along 2nd predecessor • If register allocator assigns x1, x2 and x3 to the same register, these moves can be removed • x1 .. xn usually have non-overlapping lifetimes, so this is kind of register assignment is legal
Common Sub-expression Elim • Want to compute when an expression is available in a var • Domain:
Flow functions in FX := Y op Z(in) = X := Y op Z out in FX := Y(in) = X := Y out
Flow functions in FX := Y op Z(in) = in – { X ! * } – { * ! ... X ... } [ { X ! Y op Z | X Y Æ X Z} X := Y op Z out in FX := Y(in) = in – { X ! * } – { * ! ... X ... } [ { X ! E | Y ! E 2 in } X := Y out
Problems • z := j * 4 is not optimized to z := x, even though x contains the value j * 4 • m := b + a is not optimized, even though a + b was already computed • w := 4 * m it not optimized to w := x, even though x contains the value 4 *m
Problems: more abstractly • Available expressions overly sensitive to name choices, operand orderings, renamings, assignments • Use SSA: distinct values have distinct names • Do copy prop before running available exprs • Adopt canonical form for commutative ops
Example in SSA in FX := Y op Z(in) = X := Y op Z out in0 in1 FX := Y(in0, in1) = X := (Y,Z) out
Example in SSA in X := Y op Z FX := Y op Z(in) = in [ { X ! Y op Z } out in0 in1 FX := Y(in0, in1) = (in0Å in1 ) [ { X ! E | Y ! E 2 in0Æ Z ! E 2 in1 } X := (Y,Z) out
What about pointers? • Option 1: don’t use SSA for point-to memory • Option 2: insert copies between SSA vars and real vars
SSA helps us with CSE • Let’s see what else SSA can help us with • Loop-invariant code motion
Loop-invariant code motion • Two steps: analysis and transformations • Step1: find invariant computations in loop • invariant: computes same result each time evaluated • Step 2: move them outside loop • to top if used within loop: code hoisting • to bottom if used after loop: code sinking


















