Virtual Fixture Control for Compliant Human-Machine Interfaces
Virtual Fixture Control for Compliant Human-Machine Interfaces. Panadda Marayong*, Hye Sun Na + , and Allison M. Okamura* *Mechanical Engineering Department , Johns Hopkins University, USA + Biomedical Engineering Department, University of Texas at Austin , USA.

Virtual Fixture Control for Compliant Human-Machine Interfaces
E N D
Presentation Transcript
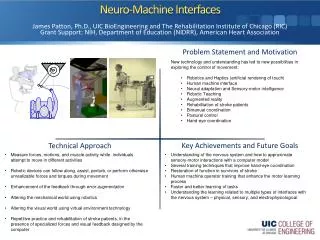
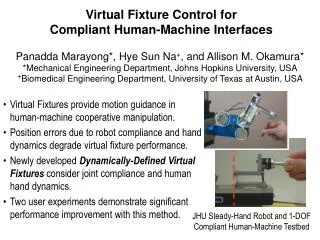
Virtual Fixture Control for Compliant Human-Machine Interfaces Panadda Marayong*, Hye Sun Na+, and Allison M. Okamura**Mechanical Engineering Department, Johns Hopkins University, USA+Biomedical Engineering Department, University of Texas at Austin, USA • Virtual Fixtures provide motion guidance in human-machine cooperative manipulation. • Position errors due to robot compliance and hand dynamics degrade virtual fixture performance. • Newly developed Dynamically-Defined Virtual Fixtures consider joint compliance and human hand dynamics. • Two user experiments demonstrate significant performance improvement with this method. JHU Steady-Hand Robot and 1-DOF Compliant Human-Machine Testbed