Download
1 / 11
110 likes | 230 Vues
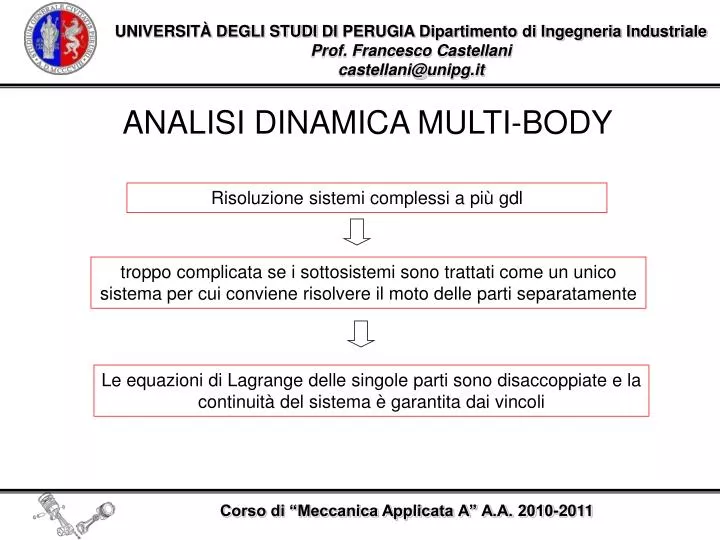
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it. Corso di “Meccanica Applicata A” A.A. 2010-2011. ANALISI DINAMICA MULTI-BODY. Risoluzione sistemi complessi a più gdl.

E N D
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 ANALISI DINAMICA MULTI-BODY Risoluzione sistemi complessi a più gdl troppo complicata se i sottosistemi sono trattati come un unico sistema per cui conviene risolvere il moto delle parti separatamente Le equazioni di Lagrange delle singole parti sono disaccoppiate e la continuità del sistema è garantita dai vincoli
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 ANALISI DINAMICA MULTI-BODY Soluzione di un sistema di equazioni per ogni “parte” • Equazioni: • Energia • Momento • Relazioni cinematiche • Cinetica e Dinamica Lagrangiana
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 EQUAZIONI DI LAGRANGE PER UN SISTEMA VINCOLATO dove qj è il vettore delle coordinate generalizzate, K è l'energia cinetica, Fqj rappresenta la componente della forza e cj e lj sono il vincolo scalare e il moltiplicatore di Lagrange.
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 MODELLAZIONE DI UNA SEMPLICE SOSPENSIONE
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 DATI CARATTERISTICI
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 MODELLO EQUIVALENTE
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 EQUAZIONI DI MOTO
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 EQUAZIONI DI VINCOLO
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 SISTEMA DI EQUAZIONI 8 equazioni in 8 incognite
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 MATRICE JACOBIANA α=s/Δt con s fattore adimensionale di scala impiegato per l’integrazione passo-passo in Δt
UNIVERSITÀ DEGLI STUDI DI PERUGIA Dipartimento di Ingegneria Industriale Prof. Francesco Castellani castellani@unipg.it Corso di “Meccanica Applicata A” A.A. 2010-2011 MATRICE JACOBIANA