Detecting Cosmic Rays in Infrared Data
This presentation covers the significant challenge of cosmic ray (CR) interference in the James Webb Space Telescope (JWST) data. Every thousand seconds, up to 20% of the field of view may be affected by CRs. We discuss various CR detection methods, including the 2-Point Difference Method, Deviation from Fit Method, and Y-Intercept Method, analyzing their effectiveness in detecting and mitigating noise. Results show that the linear fit algorithm must consider errors to optimize detection, particularly differentiating between photon-noise and read-noise regimes.

Detecting Cosmic Rays in Infrared Data
E N D
Presentation Transcript
Detecting Cosmic Rays in Infrared Data Rachel Anderson Karl Gordon RIAB Monthly Meeting
Outline • The CR Problem • Linear Fit Algorithm • CR Detection Methods • The 2-Point Difference Method • The Deviation from Fit Method • The Y-Intercept Method • Results RIAB Monthly Meeting
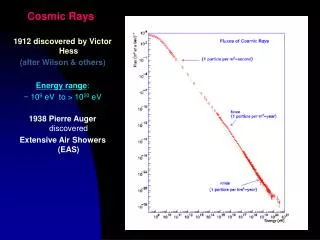
The CR Problem • Every 1000 seconds, up to 20% of the field of view of JWST will be affected by CRs Offenberg, J.D., et al. 1999 Rouscher, B., et al. 2000, STScI-NGSTR-0003A RIAB Monthly Meeting
The CR Problem • Every 1000 seconds, up to 10% - 20% of the field of view of JWST will be affected by CRs + CR = Offenberg, J.D., et al. 1999 Rouscher, B., et al. 2000, STScI-NGSTR-0003A RIAB Monthly Meeting
The CR Problem (cont.) • The Question: What is the best we can do, given the noise in the ramp? • The How: • Simulate non-destructive read ramps. • Add some CRs with various magnitudes and locations. • Test CR detection methods, then try to find them. RIAB Monthly Meeting
Linear Fit Algorithm We want to solve the equation: Y = AX, with solution: X = [ATC-1A]-1[ATC-1Y] , and C = , A = , X = Y = Fixsen, D. J., et al. 2000, PASP, 112, 1350 Gordon, K. D., et al. 2005, PASP, 117, 503 Hogg, D. W. et al. 2010, ArXiv e-prints RIAB Monthly Meeting
Linear Fit Algorithm We want to solve the equation: Y = AX, with solution: X = [ATC-1A]-1[ATC-1Y] , and C = , A = , X = Y = It is easiest to think of C as the sum of two matrices: C = R + P R = r2I , and P = Fixsen, D. J., et al. 2000, PASP, 112, 1350 Gordon, K. D., et al. 2005, PASP, 117, 503 Hogg, D. W. et al. 2010, ArXiv e-prints RIAB Monthly Meeting
CR Detection Methods • Three methods: • 2- Point Difference • Deviation from Fit • Y-Intercept • For each method: • Detect CRs (largest first) • Calculate the slope for the resulting ‘semi-ramps’ • Calculate final slope of entire ramp by taking weighted average of the slopes of the ‘semi-ramps’ Regan, M. 2007, JWST-STScI-001212 Robberto, M. 2008, JWST-STScI-0001490, SM-12 RIAB Monthly Meeting
2-Point Difference | di – μd | σd Ratio = di = yi – yi-1 μd: median of di’s σd = √2rn2 + pn2 … where pn = √μd RIAB Monthly Meeting
Deviation From Fit yi – fi σi devi = RIAB Monthly Meeting
Y-Intercept | b2 – b1 | σb Ratio = σb = √2rn2 + pn2 … where pn = √ m , and rn is calculated from un-correlated errors in our linear-fit program. RIAB Monthly Meeting
Results: Fraction Found vs. False Detections 40 Frames, Input Slope: 10.00 DN/s RIAB Monthly Meeting
Results: Fraction Found vs. False Detections 40 Frames, Input Slope: 0.00 DN/s RIAB Monthly Meeting
Results: Multiple CR’s 2-Point Difference RIAB Monthly Meeting
Conclusions • To optimize results, our linear fit algorithm must take into account correlated and un-correlated errors. • The 2-Point Difference method is simple, fast, consistent, and best for photon-noise dominated regime. • The Y-Intercept method is better in read-noise dominated regime. RIAB Monthly Meeting
Results: Number of Frames Slope = 10.0 DN/s Fraction of False Detections = 0.05 RIAB Monthly Meeting
Results: Various Slopes 2- Point Difference RIAB Monthly Meeting
Results: Various Slopes Deviation from Fit RIAB Monthly Meeting
Results: Various Slopes Y-Intercept RIAB Monthly Meeting
Linear Fit Algorithm (cont.) slopecalc / (slope-1) RIAB Monthly Meeting
Results: Number of Frames 2-Point Difference Slope = 0.00 DN/s Slope = 10.00 DN/s RIAB Monthly Meeting
Results: Number of Frames Deviation from Fit Slope = 0.00 DN/s Slope = 10.00 DN/s RIAB Monthly Meeting
Results: Number of Frames Y-Intercept Slope = 0.00 DN/s Slope = 10.00 DN/s RIAB Monthly Meeting
Results: Multiple CR’s Deviation from Fit RIAB Monthly Meeting
MIRI Parameters RIAB Monthly Meeting
Results: Multiple CR’s Y-Intercept RIAB Monthly Meeting