Download
1 / 16
160 likes | 272 Vues
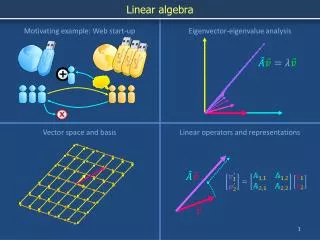
Explore linear algebra concepts such as linearly independent vectors, span of vector space, eigenvalues and eigenvectors, matrix diagonalization, rank and nullspace, least squares solutions, SVD properties, and more.

E N D
Linearly independent vectors • span(V): span of vector space V is all linear combinations of vectors vi,i.e.
The eigenvalues of A are the roots of the characteristic equation diagonal form of matrix Eigenvectors of A are columns of S
Similarity transform then A and B have the same eigenvalues The eigenvector x of A corresponds to the eigenvector M-1x of B
Least Squares • More equations than unknowns • Look for solution which minimizes ||Ax-b|| = (Ax-b)T(Ax-b) • Solve • Same as the solution to • LS solution
Properties of SVD si2 are eigenvalues of ATA Columns of U (u1 , u2 , u3 ) are eigenvectors of AAT Columns of V (v1 , v2 , v3 ) are eigenvectors of ATA
Solving pseudoinverse of A equal to for all nonzero singular values and zero otherwise with
Enforce orthonormality constraints on an estimated rotation matrix R’
Newton iteration f( ) is nonlinear parameter measurement