Adaptive Cruise Control
431 likes | 1.09k Vues
DeVvrat YMCAUST, Faridabad. Adaptive Cruise Control. Advisor(s): Dr. Munish Vashishth Mr. Dushyant Singh. Problem Statement . The main problem regarding the normal Cruise Control technology is that it is not aware of other vehicles’s movement

Adaptive Cruise Control
E N D
Presentation Transcript
DeVvrat YMCAUST, Faridabad Adaptive Cruise Control Advisor(s): Dr. MunishVashishth Mr. Dushyant Singh
Problem Statement • The main problem regarding the normal Cruise Control technology is that it is not aware of other vehicles’s movement • The driver must be always aware. Hence, possibility of mistakes • Possibility of collision with the leading car if not manually slowed down
Proposed Solution • Introduce Adaptive Cruise Control for longitudinal control of the vehicle • Speed would be automatically adjusted for safe inter-distance • Once safe inter-distance is reached, the speed would return to the desired speed set by the driver
Introduction to ACC • Extension of Cruise Control. • TRW system supports 77GHz • Autocruise RADAR based range of upto 150 mtrs & operates at spped ranging from 30-180 kph. • Delphi’s 76 GHz system can also detects objects as far as 150 mtrs & operates at speed as loas as 32kph
Requirements • Functional: • Detect leading vehicle. • Maintain desired speed. • Maintain desired timegap. • Communicate actions to User Interface • Non-Functional (timing constraints): • Response Time • Data update rate and so on… • ISO Limitations: • mean dec ≤ 3.0 m/s2 (over 2 s), • acceleration ≤ 2 m/s2
Components of ACC • Sensors: • Four Wheel Sensors, Brake Pedal Sensor, Throttle Pedal Senor, Radar … • Actuators: • Brake Actuator, Throttle Actuator. • Controllers: • High level & Low level controller. • Communication Medium USER INTERFACE SENSOR FUSION SENSOR TAC TA CONTROL UNIT TARGET DETECTION TARGET TRACKING RADAR BAC BA
Function • Preset and maintain the car speed • Measure the distance to the preceding car and the relative speed • Adjust the car speed accordingly • Maximum deceleration = 3.5m/s^2 • Change gear automatically • Function properly in poor weather condition • Effective in the speed between 30km-180km/h
System Control The system adjustment controls will typically include the following function switches: •On/off •Speed •Distance •Set •Resume •Cancel These control lever-mounted cruise control switches are on a 2006 Toyota Avalon. Vehicle Example On the 2004 Audi A8 the ACC system is operated by a control stalk on the left side of the steering column.
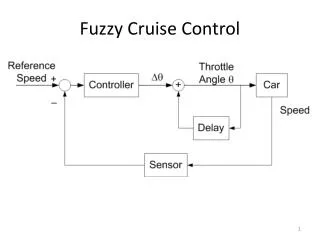
Modelling of Cruise Control Newton’s Second Law: Laplace Transform:
Transfer Function Design Specification • Rise time < 5 sec • Overshoot < 10% • Steady-State Error < 2%
Simulation of Cruise Control Open-Looped System Closed-Loop PI Control Kp = 100 Kp = 800 and Ki = 40
Modeling of ACC System ACC Controller Highway Merge-In Scenario • 1. At 0 sec, the preceding vehicle is traveling 12.5 m/s • 2. The follower vehicle w/ACC is 150 m behind the preceding vehicle and is traveling at 25 m/s • 3. At 10 sec, the third vehicle cut in in between the two vehicles Desired Range
Vehicle Characteristics • If the inertia of the wheels is neglected, and it is assumed that friction (which is proportional to the car's speed) is what is opposing the motion of the car, then the problem is reduced to the simple mass and damper system shown in the next slide.
Controller Selection • Which kind of Controller is the best? • No controller. • P controller. • PI controller. • PID controller. • PD controller.
Controller Selection No Controller P Controller Kp = 10000 Settling Time = 0.389s Steady state error = 2% Settling time = 76.7 s Steady state error > 98%
Controller Selection PI Controller *Final choice is PI Controller* Kp=800, Ki=40 Settling time = 4.89 s Steady state error = 0
Distance Checking Three scenarios: • dr > d0, cruises at desired speed, ACC inactive • dr < dc, danger zone, ACC enables to slow down • d0 < dr < dc, ACC is enable to reach safe inter-distance
Implementation of Distance Checking • The distance checking algorithm only requires a minimum distance and a range. • The algorithm calculates the actual minimum distance (> provided distance) and maximum distance and then outputs the new speed of the vehicle. • The user can also provide a maximum and minimum speed for the vehicle.
Implementation of Distance Checking temp=(300*(speedmax-speedmin))/(12*range) minimum_Distance=(minimum_Distance*32)/10 max_Distance = minimum_Distance + (3*range) if (distance > (max_Distance)) speed = speedmax; if (distance < minimum_Distance) speed = 0; if ((distance < max_Distance) and (distance>minimum_Distance)) if leader_speed > 0 speed = ((100*speedmin-(kvit*(minimum_distance))) + temp * distance)/100; else speed = ((100*speedmin+(kvit*(max_Distance))) + temp * distance)/100;
Simulation The following parameters were used for the simulation: • Maximum follower vehicle speed = 100 m/s • Minimum follower vehicle speed = 0 m/s • Minimum distance = 40 m • Range = 20 m • Initial distance = 80 m • Kp = 800 • Ki = 40 • b = 50 • m = 1000
Simulation Yellow: Distance between two vehicles Blue: Speed of the leader vehicle Purple: Speed of the follower vehicle
Limitations/Conclusion • Not a complete transfer function of the vehicle and environment. • Linear distance-checking model. • No limitations on the acceleration and jerk. • Our model is simplified compared to real-time models, but can be used to implement a practical ACC.
Availability • Adaptive cruise control is the common term • used for an enhanced cruise control system. • Depending on the vehicle maker, ACC • systems may also be called Active Cruise • Control (BMW), Distronic (Mercedes-Benz), • Dynamic Cruise Control (Lexus, Toyota), or • Intelligent Cruise Control (Infiniti). Vehicle • makers offering ACC systems include, but • may not be limited to: • • Acura • • Audi • • BMW • • General Motors • • Infiniti • • Jaguar • • Lexus • Toyota • • Mercedes-Benz • • Volkswagen • • Volvo ACC systems are available on some vehicle models, such as the 2006 Jaguar XK (top), and the 2006 Cadillac DTS (bottom).