Orbital Mechanics Overview
Orbital Mechanics Overview. MAE 155A G. Nacouzi. James Webb Space Telescope, Launch Date 2011. Primary mirror: 6.5-meter aperture Orbit: 930,000 miles from Earth , L3 point Mission lifetime: 5 years (10-year goal) Telescope Operating temperature: ~45 Kelvin Weight: Approximately 6600kg.

Orbital Mechanics Overview
E N D
Presentation Transcript
Orbital Mechanics Overview MAE 155A G. Nacouzi GN/MAE155A
James Webb Space Telescope, Launch Date 2011 Primary mirror: 6.5-meter aperture Orbit: 930,000 miles from Earth , L3 point Mission lifetime: 5 years (10-year goal) Telescope Operating temperature: ~45 Kelvin Weight: Approximately 6600kg GN/MAE155A
Overview: Orbital Mechanics • Study of S/C (Spacecraft) motion influenced principally by gravity. Also considers perturbing forces, e.g., external pressures, on-board mass expulsions (e.g, thrust) • Roots date back to 15th century (& earlier), e.g., Sir Isaac Newton, Copernicus, Galileo & Kepler • In early 1600s, Kepler presented his 3 laws of planetary motion • Includes elliptical orbits of planets • Also developed Kepler’s eqtn which relates position & time of orbiting bodies GN/MAE155A
Overview: S/C Mission Design • Involves the design of orbits/constellations for meeting Mission Objectives, e.g., coverage area • Constellation design includes: number of S/C, number of orbital planes, inclination, phasing, as well as orbital parameters such as apogee, eccentricity and other key parameters • Orbital mechanics provides the tools needed to develop the appropriate S/C constellations to meet the mission objectives GN/MAE155A
Introduction: Orbital Mechanics • Motion of satellite is influenced by the gravity field of multiple bodies, however, 2 body assumption is usually used for initial studies. Earth orbiting satellite 2 Body assumptions: • Central body is Earth, assume it has only gravitational influence on S/C, MEarth >> mSC • Gravity effects of secondary bodies including sun, moon and other planets in solar system are ignored • Solution assumes bodies are spherically symmetric, point sources (Earth oblateness can be important and is accounted for in J2 term of gravity field) • Only gravity and centrifugal forces are present GN/MAE155A
Sources of Orbital Perturbations • Several external forces cause perturbation to spacecraft orbit • 3rd body effects, e.g., sun, moon, other planets • Unsymmetrical central bodies (‘oblateness’ caused by rotation rate of body): • Earth: Radius at equator = 6378 km, Radius at polar = 6357 km • Space Environment: Solar Pressure, drag from rarefied atmosphere GN/MAE155A
Relative Importance of Orbit Perturbations Reference: SpacecraftSystems Engineering, Fortescue & Stark • J2 term accounts for effect from oblate earth • Principal effect above 100 km altitude • Other terms may also be important depending on application, mission, etc... GN/MAE155A
Two Body Motion (or Keplerian Motion) • Closed form solution for 2 body exists, no explicit solution exists for N >2, numerical approach needed • Gravitational field on body is given by: Fg = M m G/R2 where, M~ Mass of central body; m~ Mass of Satellite G~ Universal gravity constant R~ distance between centers of bodies For a S/C in Low Earth Orbit (LEO), the gravity forces are: Earth: 0.9 g Sun: 6E-4 g Moon: 3E-6 g Jupiter: 3E-8 g GN/MAE155A
M r m j h Two Body Motion (Derivation) For m, we have m.h’’ = GMmr/(r^2 |r|) m.h’’ = GMmr/r^3 h’’ = r/r^3 where h’’= d2h/dt2 & = GM For M, Mj’’ = -GMmr/(r^2 |r|) j’’ = -Gmr/r^3, but r = j-h => r’’ = -G(M+m) r/r^3 for M>>m => r’’ + GM r/r^3= 0, or r’’ + r/r^3 = 0 (1) GN/MAE155A
Two Body Motion (Derivation) From r’’ + r/r^3 = 0 => r xr’’ + r x r/r^3 = 0 => r xr’’ = 0, but r xr’’ = d/dt ( r x r’) = d/dt (H), d/dt (H) =0, where H is angular momentum vector, i.e. r and r’ are in same plane. Taking the cross product of equation 1with H, we get: (r’’x H) + /r^3 (rx H) = 0 (r’’x H) = /r^3 (H x r), but d/dt (r’ x H) = (r’’x H) + (r’ x H’) => d/dt (r’ x H) = /r^3 (H x r) => d/dt (r’ x H) = /r^3 (r2 ’) r = ’ = r’ ( r is unit vector) d/dt (r’ x H) = r’ ; integrate => r’ x H = r + B =0 GN/MAE155A
Two Body Motion (Derivation) r . (r’ x H) = r . ( r + B) = (r x r’) . H = H.H = H2 => H2 = r + r B cos () => r = (H2 / )/[1 + B/ cos()] p = H2 / ; e = B / ~ eccentricity; ~ True Anomally => r = p/[1+e cos()] ~ Equation for a conic section where, p ~ semilatus rectum Specific Mechanical Energy Equation is obtained by taking the dot product of the 2 body ODE (with r’), and then integrating the result r’.r’’ + r.r’/r^3 = 0, integrate to get: r’2/2 - /r = GN/MAE155A
General Two Body Motion Equations d2r/dt2 + r/R3 = 0 (1) where, = GM,r ~Position vector, and R = |r| Solution is in form of conical section, i.e., circle ~ e = 0, ellipse ~ e < 1 (parabola ~ e = 1 & hyperbola ~ e >1) V Specific mechanical energy is: Local Horizon KE + PE, PE = 0 at R= & PE<0 for R< a~ semi major axis of ellipse H = R x V = R V cos (), where H~ angular momentum & ~ flight path angle (FPA, between V & local horizontal) GN/MAE155A
Circular Orbits Equations • Circular orbit solution offers insight into understanding of orbital mechanics and are easily derived • Consider: Fg = M m G/R2 & Fc = m V2 /R (centrifugal F) V is solved for to get: V= (MG/R) = (/R) • Period is then: T=2R/V => T = 2(R3/) V Fc R Fg * Period = time it takes SC to rotate once wrt earth GN/MAE155A
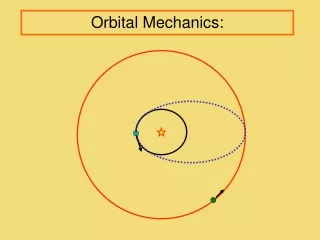
General Two Body Motion Trajectories Hyperbola, a< 0 Circle, a=r a Parabola, a = Ellipse, a > 0 Central Body • Parabolic orbits provide minimum escape velocity • Hyperbolic orbits used for interplanetary travel GN/MAE155A
Elliptical Orbit Geometry & Nomenclature V Periapsis a c R Line of Apsides Rp b Apoapsis S/C position defined by R & , is called true anomaly R = [Rp (1+e)]/[1+ e cos()] • Line of Apsides connects Apoapsis, central body & Periapsis • Apogee~ Apoapsis; Perigee~ Periapsis (Earth nomenclature) GN/MAE155A
Orbit is defined using the 6 classical orbital elements including: Eccentricity, semi-major axis, true anomaly and inclination, where Inclination, i, is the angle between orbit plane and equatorial plane Elliptical Orbit Definition Periapsis i Vernal Equinox Ascending Node • Other 2 parameters are: • Argument of Periapsis (). Ascending Node: Pt where S/C crosses equatorial plane South to North • Longitude of Ascending Node ()~Angle from Vernal Equinox (vector from center of earth to sun on first day of spring) and ascending node GN/MAE155A
General Solution to Orbital Equation • Velocity is given by: • Eccentricity: e = c/a where, c = [Ra - Rp]/2Ra~ Radius of Apoapsis, Rp~ Radius of Periapsis • e is also obtained from the angular momentum H as: e = [1 - (H2/a)]; and H = R V cos () GN/MAE155A
More Solutions to Orbital Equation • FPA is given by: tan() = e sin()/ ( 1+ e cos()) • True anomaly is given by, cos() = (Rp * (1+e)/R*e) - 1/e • Time since periapsis is calculated as: t = (E- e sin(E))/n, where, n = /a3; E = acos[ (e+cos())/ ( 1+ e cos()] GN/MAE155A
Some Orbit Types... • Extensive number of orbit types, some common ones: • Low Earth Orbit (LEO), Ra < 2000 km • Mid Earth Orbit (MEO), 2000< Ra < 30000 km • Highly Elliptical Orbit (HEO) • Geosynchronous (GEO) Orbit (circular): Period = time it takes earth to rotate once wrt stars, R = 42164 km • Polar orbit => inclination = 90 degree • Molniya ~ Highly eccentric orbit with 12 hr period (developed by Soviet Union to optimize coverage of Northern hemisphere) GN/MAE155A
Sample Orbits LEO at 0 & 45 degree inclination Elliptical, e~0.46, I~65deg Lat =.. Ground trace from i= 45 deg GN/MAE155A
Sample GEO Orbit • Nadir for GEO (equatorial, i=0) • remain fixed over point • 3 GEO satellites provide almostcomplete global coverage Figure ‘8’ trace due to inclination, zero inclination has no motion of nadir point (or satellite sub station) GN/MAE155A
Orbital Maneuvers Discussion • Orbital Maneuver • S/C uses thrust to change orbital parameters, i.e., radius, e, inclination or longitude of ascending node • In-Plane Orbit Change • Adjust velocity to convert a conic orbit into a different conic orbit. Orbit radius or eccentricity can be changed by adjusting velocity • Hohmann transfer: Efficient approach to transfer between 2 Non-intersecting orbits. Consider a transfer between 2 circular orbits. Let Ri~ radius of initial orbit, Rf ~ radius of final orbit. Design transfer ellipse such that: Rp (periapsis of transfer orbit) = Ri (Initial R) Ra (apoapsis of transfer orbit) = Rf (Final R) GN/MAE155A
Hohmann Transfer Description Transfer Ellipse Rp = Ri Ra = Rf DV1 = Vp - Vi DV2 = Va - Vf DV = |DV1|+|DV2| Note: ( )p = transfer periapsis ( )a = transfer apoapsis DV1 Ra Rp Ri Rf Initial Orbit DV2 Final Orbit GN/MAE155A
General In-Plane Orbital Transfers... • Change initial orbit velocity Vi to an intersecting coplanar orbit with velocity Vf (basic trigonometry) DV2 = Vi2 + Vf2 - 2 Vi Vf cos (a) Final orbit DV Initial orbit Vi Vf a GN/MAE155A
Aerobraking • Aerobraking uses aerodynamic forces to change the velocity of the SC therefore its trajectory (especially useful in interplanetary missions) • Instead of retro burns, aeroforces are used to change the vehicle velocity GN/MAE155A
Other Orbital Transfers... • Hohman transfers are not always the most efficient • Bielliptical Tranfer • When the transfer is from an initial orbit to a final orbit that has a much larger radius, a bielliptical transfer may be more efficient • Involves three impulses (vs. 2 in Hohmann) • Low Thrust Transfers • When thrust level is small compared to gravitational forces, the orbit transfer is a very slow outward spiral • Gravity assists - Used in interplanetary missions • Plane Changes • Can involve a change in inclination, longitude of ascending nodes or both • Plane changes are very expensive (energy wise) and are therefore avoided if possible GN/MAE155A
Examples& Announcements GN/MAE155A