Download
1 / 20
200 likes | 217 Vues
This article explains the concepts of angular displacement, velocity, and acceleration in rotational motion, as well as torque and the conditions for equilibrium. It also provides an example problem on torque calculation.

E N D
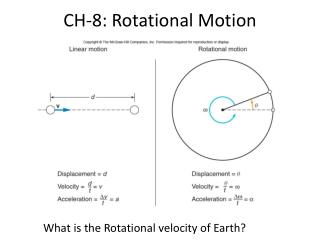
Angular Displacement • Angular displacement is a measure of the angle a line from the center to a point on the outside edge sweeps through as the object rotates • We use the greek letter “theta” to represent angular displacement • Angular displacement is measured in “radians”
r s r Arc Length • Arc length is represented by the letter s • it is the distance a point on the edge of the object rotates through • measured in meters
Angular Velocity • Angular velocity is a measure of the rate of change of the angular position or the “spin rate” • We use the greek letter lowercase “omega” () to represent angular velocity mathematically • Angular velocity is measured in “radians per second” (rad/sec)
Angular Velocity r r May also be expressed in rpm (revolutions per minute) but must be converted to rad/sec for calculations
Angular Acceleration • Angular acceleration is the rate of change of angular velocity • We use the greek letter “alpha” to represent angular acceleration • Angular acceleration is measured in radians per second per second (rad/sec2)
Angular Acceleration r r
Conversions and signs For rotating objects, clockwise (cw) is negative and counter-clockwise (ccw) is positive. This applies to Ɵ, ɷ, and α. Conversions:
What is Torque? • Torque is a measure of how much a force acting on an object causes that object to rotate. • Torque is dependent on force and lever arm and is measured in Newton-meters (Nm)
Lever arm Lever arm 1 2 F1 F2 pivot Lever Arm • Distance measured perpendicularly from the line of force to the pivot point. • Measured in meters
pivot F Calculating Torque Torque = Force * lever-arm The symbol for torque is the greek letter “tau” Note: Force and lever arm must be perpendicular to each other
F F pivot F d F Calculating TorqueBy finding the component of force perpendicular to d F - the perpendicular component of the force F// - the parallel component of the force – it does not cause torque (lever arm = 0)
“” is the angle between d and the line of F =dsin pivot d F “d” is the distance from where the force is applied to the pivot point Or Calculating Torque by finding the lever arm
Net Torque • The net torque is the sum of all the individual torques. • Torque that is clockwise (cw) is negative and torque that is counter-clockwise (ccw) is positive.
Rotational Equilibrium In rotational equilibrium, the sum of all the torques is equal to zero. In other words, there is no net torque on the object. There is no angular acceleration. The object is either not rotating or it is rotating at a constant speed. or
Linear Equilibrium In linear equilibrium, the sum of all the forces is equal to zero. In other words, there is no net force on the object. There in no linear acceleration. (a = 0) The object is either not moving linearly or it is moving at a constant velocity. and
Total Equilibrium In total equilibrium, both net force and net torque are equal to zero. In other words, there is no net force or net torque on the object. and
EXAMPLE PROBLEM ON TORQUE: The Swinging Door QuestionIn a hurry to catch a cab, you rush through a frictionless swinging door and onto the sidewalk. The force you exerted on the door was 50N, applied perpendicular to the plane of the door. The door is 1.0 m wide. Assuming that you pushed the door at its edge, what was the torque on the swinging door (taking the hinge as the pivot point)? Hints • Where is the pivot point? • What was the force applied? • How far from the pivot point was the force applied? • What was the angle between the door and the direction of force?
Solution The pivot point is at the hinges of the door, opposite to where you were pushing the door. The force you used was 50N, at a distance 1.0m from the pivot point. You hit the door perpendicular to its plane, so the angle between the door and the direction of force was 90 degrees. Since then the torque on the door was: τ= (1.0m) (50N) sin(90°) τ = 50 N m