Download
1 / 13
130 likes | 161 Vues
Predicting the next location on a trajectory can enhance services like navigation, traffic management, and location-based advertising. Learn how T-Pattern mining and prediction trees are used for accurate location predictions.

E N D
WhereNext: a Location Predictor on Trajectory Pattern Mining Anna Monreale Fabio Pinelli Roberto Trasarti Fosca Giannotti e-mail: [name].[surname]@isti.cnr.it Knowledge Discovery and Delivery Lab (ISTI-CNR & Univ. Pisa, Italy) www-kdd.isti.cnr.it KDD 2009 - Paris
Next Location Prediction:Motivations ? .35 Hotel ? .4 Hospital ? .8 Station Predicting the next location of a trajectory can improve a large set of services such as: Navigational services. Traffic management. Location-based advertising. Services Pre-fetching. Simulation.
Basic Idea: People move as the crowd moves Prediction Tree Trajectories dataset Local patterns How to realize this idea: Using Local movement patterns as predictive rules. Extract patterns from all the available movements in a certain area instead of on the individual history of an object; Use such learning as predictor when an individual movement is close enough to a collective movement behavior
Trajectory Pattern Mining The local patternwe use is the T-Pattern. It describes the common behavior of group of users in space and time. F. Giannotti, M. Nanni, F. Pinelli, and D. Pedreschi. Trajectory pattern mining. KDD 2007: 330-339.
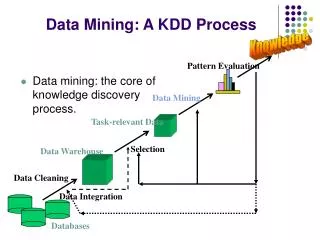
The Method Select the set of interesting trajectories Extract T-Patterns (The Local patterns) A priori prediction power measurement Merge T-Patterns (Global model) Use the Condensed model as predictor A posteriori analysis
T-Pattern Tree Having the best set of T-Patterns we can merge them to build the global model. The compact representation is the prefix-tree. For Each node v• Id identifies the node v • Region a spatial component of the T-Pattern • Support is the support of the T-pattern For Each edge j • [a,b] correspond to the time interval αn of the T-Pattern
Predict by means of T-Pattern tree Best Match Candidates Predictions How to compute the Best Match? Having a new trajectory we follow these steps: • Search for best match • Candidates generation • Make predictions
Punctual Score and Path Score The punctual score is the spatio-temporal distance computed between the segment of trajectory (bounded in time using the previous transition time) and a node of a path. The Best Matching path is the path having: • the maximum path score; • at least one admissible prediction. The path score is the aggregation of all punctual scores along a path. Three kinds of possible aggregation: • Average generalizes distances between the trajectory and each node • Sum is based on the concept of depth • Max is the optimistic one, the best punctual score is selected as path score
A Posteriori analysis Predicted Location Cut Original Error Cut Predicted Location Original The results are evaluated using the following measures: Accuracy: rate of the correctly predicted locations (space and time) divided by the total number of trajectories to be predicted. Average Error: the average distance between the real trajectories in the predicted interval and the region predicted. Prediction rate: the number of trajectories which have a prediction divided by the total number of trajectories to be predicted.
Experiments The experiments are performed on the Milan dataset provided by the GeoPKDD project. Training set: 4000 trajectories between 7am and 10am on Wednesday Test set: 500 trajectories between 7am and 10 am on Thursday. AccuracyvsPrediction rate
The System Part of the GeoPKDD integrated platform. F. Giannotti, D. Pedreschi, and et al. Geopkdd: Geographic privacy-aware knowledge discovery and delivery (european project), 2008. A visual example of the application on Milan mobility data. The context is traffic management and we want to predict how the traffic will move in the city center. We have built a predictor on a “good” set of T-patterns which include the city gates of Milan.
Conclusions - A new technique to predict the next locations of a trajectory based on previous movements of all the objects without considering any information about the users.- The time information is used not only to order the events but is intrinsically equipped in the T-Patterns used to build the Prediction tree.- The user can tune the method to obtain a good accuracy and prediction rate. - We have experimented the method in real world application.
Thank you for your attention. Questions?