Download
1 / 42
440 likes | 746 Vues
Design of Anisotropic Magnetic Sensors for Commercial and Automotive Sensors. Michael J. Haji-Sheikh Associate Professor of Electrical Engineering, College of Engineering and Engineering Technology, Northern Illinois University. AMR Sensors at Honeywell in the 1990's.

E N D
Design of Anisotropic Magnetic Sensors for Commercial and Automotive Sensors. Michael J. Haji-Sheikh Associate Professor of Electrical Engineering, College of Engineering and Engineering Technology, Northern Illinois University.
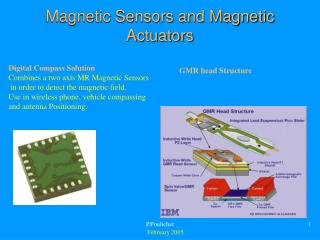
AMR Sensors at Honeywell in the 1990's SSEC in Plymouth specializes in low field sensing. 3-axis low field sensor Sensing and Control Specializes in Industrial and Automotive. Current Sensor Crank and Cam position sensor
Crazy Stuff Measuring magnetic fields all over Chicago looking for stray fields. The customer was worried that the magnetic environment would change the response.
Experience Started at the Honeywell Microswitch Sensor Fab in 1992. Assigned to the G.M. Support team in 1994 with very limited background in AMR. Filed the “TaN/NiFe/TaN anisotropic magnetic sensor element”, U.S. Patent No. 5,667,879 which was the first truly manufacturable AMR monolithic process. There are 15 to 30 million of the Honeywell AMR sensors on the road.
Prototype speed and direction sensor • Ion Milled Sensor. • Double Level metal. • Ion Milled Metal 1. • I2L logic. • Minimum Metal Pitch Possible 2 m. • AMR film coated with Conductive Metal-Nitride.
Experience cont. Started an AMR modeling program at Honeywell's Sensing and Control's Sensor Fab in 1996. 11 US patents 3 European Patents. 7 divisional technical awards. Portfolio contains experience in Semiconductor manufacturing, pressure sensors, flow sensors, Hall sensors and nanoporous media / capacitance sensors.
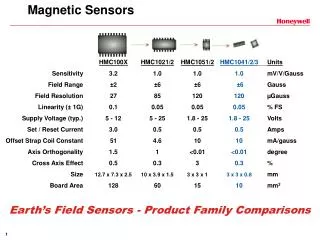
High Field vs. Low Field Magnetic Sensing applications can be divided into high fields and low field applications. Low field applications are often in the range of the Earths magnetic field. High field applications are anywhere from around a Gauss (10-4 T) to 2000 Gauss (0.20 T).
The Hall effect and the Ordinary Magnetoresistance effect are directly connected. The change in resistance is a function of Mobility and Geometry. Unlike the above case, an AMR sensor senses fields in plane.
AMR sensors are sensitive to in-plane fields. The resistance is reduced with rotation of the magnetization. The transverse magnetoresistance curve for a 37.5 nm thick magnetoresistor with a 35 μm wide resistor.
Applications Gearboxes Wheelspeed Engine control High current sensing. Linear position sensing
Integrated AMR Sensor Ion Milled Sensor. Double Level Au. Ion Milled Metal 1. I2L logic. Minimum Metal Pitch Possible 2 m. Patent Number 5,667,879M. J. Haji-Sheikh
Close -up of Sensor 12 m wide by 2 m gap. Pattern cut 45° to easy axis of deposition
Cross-Sectional View of Sensor Process TaN/NiFe/TaN Al TaN/NiFe/TaN SiO2 TiW PtSi Si
Speed and Direction Sensor - uses phase differences between both of the sensors. Wheelspeed only measures rotational velocity High current sensing measures the field induced by a current flowing in a wire. Engine position sensing measures the position of a gear attached to a crankshaft or a camshaft
Measurement To develop this type of sensor it is critical to develop a high precision measurement system. The method of designing the physical Device Under Test or DUT is also very important. The type of test system that has the least amount of test artifacts is a x-y Helmholtz system. Non-magnetic probes help prevent field distortion and high precision voltmeters along with low noise stable power supplies also improve this measurement.
To properly test this type of structure it is important to avoid the Vander Pauw test structure and use straight line resistors connected in a Kelvin type manner.
Setting up the Model Upper figure is a schematic for the model. Lower figure is the CAD drawing of the test structure
Manufacturing The method of film production is important in the behavior of the film. RF Magnetron systems with base pressures in the low 10-8 torr range. Film thickness is an important variable in controlling the sensitivity. Film patterning allows for influencing the geometric factors.
Argonne National lab beamline data for permalloy films of varying thickness. This data indicates an influence of the underlying film on the preferred orientation. The preferred composition is 81% Ni and 19% Iron to minimize magnetostriction. Synchrotron X-ray reciprocal mapping of permalloy thin films using an image plate. Courtesy Y. Yoo taken at Argonne National Labs.
The TaN 111 stops growing in intensity as the NiFe gets thicker.
The effective resistivity equation than can be used to plot experimental vs model.
Cobalt data fit using the same method of fit as the permalloy data. Film thickness are 100, 200, and 1880 Angstroms.
Design of a Meander Sensor Bridge in Saturation Mode Meander Sensors have elements laid out in a Wheatstone bridge at 90 degrees to each other.
The tensor model accurately predicts the behavior of an actual sensor in an actual wheelspeed sensor..
Below Saturization When saturated the magnetization follows the external field no matter where it comes from. Below saturization the magnetization will rotate with increasing field strength.
Stoner-Wohlforth astroid. The SWA needs to be much sharper to match the real data.
Assume Mo and Ku are elliptical in behavior Extract Theta from the Data!
This graph demonstrates the behavior of the model versus the actual sensor results. Unfortunately this model is not as predictive as necessary.
Off-axis fields produce large decreases in sensitivity due to the parallel components of the external fields.
Easy axis behavior is independent of proximity effects. All AMR sensors exhibit this behavior. Meander type sensors will actually turn off until the magnetization completely reverses. Barber-Pole sensors will change sense when the magnetization direction reverses.
Model for proximity by Bharat Pant Schematic of sensor elements using the proximity effect for a serpentine resistor array. The analysis of the effect uses the electrostatic model for magnetics and can be solved numerically. I have a simple model for the analysis of multiple runner sensor if anyone is interested.
The barber -pole sensor Common sensor for below saturization applications. Good for compass applications. Shorting straps reduce the series R.
Barber – pole sensors should be designed using a software tool such as ANSYS. The signal is maximized when the current is running truly at 45 degrees to the magnetization direction.
Conclusions Magnetic design is still full of quirks. No straight forward design methodology. Characterization of a particular deposion system in very important.
References Sensors: Advancements in Modeling, Design Issues , Fabrication, and Practical Applications. Subhas Chandra Mukhopadhyay and Yueh-Min Huang Editors. Springer 2008.