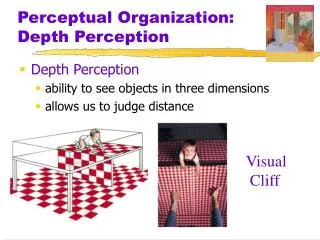
3D Space Perception (aka Depth Perception)
3D Space Perception (aka Depth Perception). 3D Space Perception. The flat retinal image problem : How do we reconstruct 3D-space from 2D image? What information is available to support this process? Interaction between Perceived Size and Perceived Distance (both depend upon “scaling”).

3D Space Perception (aka Depth Perception)
E N D
Presentation Transcript
3D Space Perception • The flat retinal image problem:How do we reconstruct 3D-space from 2D image?What information is available to supportthis process? • Interaction between Perceived Size and Perceived Distance (both depend upon “scaling”)
Size Constancy Perceived size is not slavishly linked to retinal size; otherwise your car would appear to be smaller when observed at increasing distances.Instead, perceived size tends to remain invariant across observation distance…a phenomenon known as size constancy.Perceived size depends upon the psychological scaling of retinal size relative to perceived distance. Hence, size, distance and 3D visual perception are all based upon a more complex process known as spatial scaling. Corollary: Perceived Speed = retinal velocity x scaled distance
Failures of Size Constancy The Moon Illusion
Failures of Size Constancy The Buechet Chair Click here for more
Failures of Size Constancy The Ames Room(Iowa State University at Ames, IA)
Oculomotor Information • State of Accommodation • State of Vergence
Accommodation In theory, the efferentsignal driving the ciliary muscles (and/or afferent feedback from stretch sensors in the ciliary muscles) could be used by higher-order visual processes to help scale 3D space and/or visual distance. There is little evidence to support this hypothetical role of accommodation.
Vergence Eye Movements Support for the role of efferent/afferent 3D information from vergence eye movements comes from: “Tower Speed Illusion” and Botox Treatment of Rectus Muscles in Strabismus Surgery
Static MonocularSources of 3D Information • Occlusion • Familiar Size (Relative Size) • Texture Gradients • Linear Perspective • Aerial Perspective (Atmospheric extinction) • Shadow Casting
Occlusion Near objects block visual access to far objects
Linear Perspective Parallel lines on the visual plane converge toward the “vanishing point” with increasing observation distance This law of projective geometry provides a strong cue about distance and 3D space.
Familiar Size/Relative Size Objects of the same physical size project different size retinal images depending upon the observation distance. This knowledge and prior experience contribute to 3D space perception. What is the height of this sculpture in feet?
Familiar Size Cue Novel objects can be psychologically scaled given visual references of known size. For example… Easter Island Sculpture with Familiar Size Cue Easter Island Sculpture without Familiar Size Cue
Texture Gradients An extended surface with uniform spatial texture will project a retinal image with a non-uniform texture gradient that increases in spatial frequency as observation distance increases.
Aerial Perspective Particulate matter in the atmosphere scatters light; reducing contrast and intensity of the retinal image. The light from distant objects must pass through more atmosphere than the light from near objects.
Shadow Casting Just as occlusion of objects serves as a powerful cue for depth…occlusion of the illuminant (sun) forms shadows which provide a powerful source of information for extracting 3D representations from a 2D retinal image.
Identify the Monocular Depth Cues A Rainy Day in Paris Gustav Caillebotte (1848-1894)
Identify the Monocular Depth Cues Linear Perspective Occlusion Texture Gradient Aerial Perspective Shadow Casting Familiar Size A Rainy Day in Paris Gustav Caillebotte (1848-1894)
Dynamic MonocularSources of 3D Information • Motion Parallax • Relative Angular Velocity • Radial Expansion/Looming • Moving Shadows
Motion Parallax Motion parallax occurs when an observer fixates a point at intermediate distance and then rotates their head. Objects in the distance appear to move WITH head motion; while objects closer than the fixation plane appear to move AGAINST the rotation of the head. Motion Parallax and Dynamic Shadow Casting Demo
Optic Flow: Radial Expansion Optic Flow and Driving Demo
Delta Angular Velocity/Angular Size Lecture Note: Need for improved Slow Moving Vehicle sign/
Advantages of Binocularity • Redundancy (survival value) • Stereopsis (Predators)Large Field-of-View (Prey) • Binocular summation improves sensitivityby √2 (signal:noise ratio sampling theory) Binocular acuity better than monocular; Same for CSF and many other functions
Binocular Vision (cont.) • Binocular rivalry(Role of the “dominant” eye) • Autokinesis phenomenon
Stereopsis • Ability to use binocular retinal disparity information to extract relative depth information from the retinal image pairs • Retinal “mismatch” can be used to reconstruct much of the missing 3rd dimension from the flat retinal images
Retinal DisparityUnderstanding begins with a consideration of the geometry of the horopter
Horopter(Corresponding Retinal Images) The HOROPTER is an imaginary surface whose points are all at the same distance as the fixation point. Points on the horopter project to corresponding locations on the temporal and nasal retinas, respectively. These corresponding locations exhibit zero retinal disparity i.e., D = dtemporal – dnasal = 0
“Crossed” and Uncrossed” Retinal Disparity The corresponding locations for the “closer” green stimulus exhibits positive retinal disparity D = dtemporal – dnasal> 0(or “crossed” disparity) The corresponding locations for the “farther” red stimulus exhibits negative retinal disparity D = dtemporal – dnasal< 0(or “uncrossed” disparity)
Nativists v. Empiricists “Debate” • Nativist positionThe CNS is capable of processing many environmental invariants at birth – giving rise to direct perception (e.g., James Gibson) • Empiricist positionSensory information is too impoverished to explain perceptual experience without recourse to knowledge about the world; it is based upon “unconscious inference” (e.g., Bishop Berkeley)
Support for Nativism • Eleanor Gibson’s Visual Cliff Experiment(and HRD replication studies) • BelaJulesz’sRandom Dot Stereogram paradigm
Random DotStereograms Can retinal disparity yield perception of depth independent of knowledge about the nature of the world? Nativist vs. Empiricist Debate BelaJulesz
Red-Blue Anaglyph Technique(black background) Anaglyph glasses transmit RED and MAGENTA dots to the left eye; and, the BLUE and MAGENTA dots to the right eye. Demo stimulus from USD’s PSYC 301 Lab