Download
1 / 20
250 likes | 423 Vues
3D transformation and viewing. UNIT - 5. 3D Point. We will consider points as column vectors . Thus, a typical point with coordinates (x, y, z) is represented as:. (into screen). Representation of 3D Transformations. Z axis represents depth Right Handed System

E N D
3D transformation and viewing UNIT - 5
3DPoint • We will consider points as column vectors. Thus, a typical point with coordinates (x, y, z) is represented as:
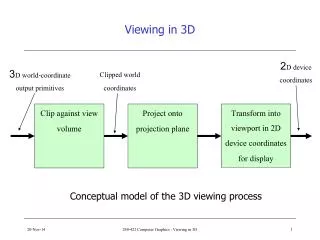
(into screen) Representation of 3D Transformations • Z axis represents depth • Right Handed System • When looking “down” at the origin, positive rotation is CCW • Left Handed System • When looking “down”, positive rotation is in CW • More natural interpretation for displays, big z means “far”
Translation • Objects are usually defined relative to their own coordinate system. We can translate points in space to new positions by adding offsets to their coordinates, as shown in the following vector equation. P’ = T . P
Translatinga point with translation with vector T = (tx,ty,tz). x’ = x + tx y’ = y + ty z’ = z + tz
3D Translations. • An object is translated in 3D dimensional by transforming each of the defining points of the objects.
Rotation • Rotations in three-dimensions are considerably more complicated than two-dimensional rotations. • In general, rotations are specified by a rotation axis and an angle. • In two-dimensions there is only one choice of a rotation axis that leaves points in the plane.
Rotation about z axis Rotation is in the following form :
3D Transformations: Rotation • One rotation for each world coordinate axis
P is scaled to P' by S: 3D Scaling Called the Scaling matrix S =
3D Scaling • Scaling with respect to the coordinate origin
3D Scaling • Scaling with respect to a selected fixed position (xf, yf, zf) • Translate the fixed point to origin • Scale the object relative to the coordinate origin • Translate the fixed point back to its original position
3D Reflections • About an axis:equivalent to 180˚rotation about that axis
3D Shearing • Modify object shapes • Useful for perspective projections: • E.g. draw a cube (3D) on a screen (2D) • Alter the values for xand y by an amount proportional to the distance from zref