Download
1 / 66
660 likes | 798 Vues
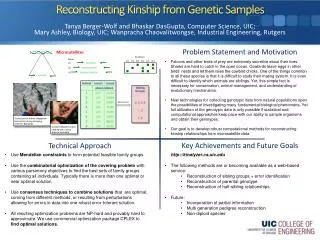
This paper presents a comprehensive approach to reconstructing and visualizing architectural interiors from images. It outlines the goals of developing a fully automated system that generates simple and accurate 3D models suitable for real-time interactive applications. Key challenges addressed include texture-poor surfaces and complex visibility in indoor environments. The paper details the system pipeline, algorithmic advancements, and experimental results that demonstrate the efficacy of the proposed methodology. Future work and references are also discussed.

E N D
Reconstructing Building Interiors from Images Yasutaka Furukawa Brian Curless Steven M. Seitz University of Washington, Seattle, USA 2011/01/16 蔡禹婷
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Reconstruction and Visualization of Architectural Scenes • Semi-automatic(Manual ) • Google Earth & Virtual Earth • Façade : Building facade made for use as a real-time video game engine environment. • Automatic • Ground-level images • Aerial images: A projected image which is "floating in air", and cannot be viewed normally. Aerial images Google Earth 4 Virtual Earth
Reconstruction and Visualization of Architectural Scenes • Difficulty • Little attention paid to indoor scenes • If you walk inside your home and take photographs, generating a compelling 3D reconstruction and visualization becomes much more difficult. ? ? Google Earth 4 Virtual Earth ? ? Aerial images
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Goal • Fully automatic system for interiors / outdoors • Reconstructs a simple 3D model from images • Provides real-time interactive visualization
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Challenges • Reconstruction • Multi-view stereo (MVS) typically produces a dense model • We want the model to be • Simple for real-time interactive visualization of a large scene (e.g., a whole house) • Accurate for high-quality image-based rendering • Simple mode is effective for compelling visualization
Challenges • Indoor Reconstruction Texture-poor surfaces Complicated visibility Prevalence of thin structures (doors, walls, tables)
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
System pipeline • 3D reconstruction and visualization system for architectural scenes.
System pipeline • Image-based • SFM • MVS • MWS • Merging
System pipeline Image-based Image-based SFM MVS MWS Merging Image-based
System pipeline Image-based SFM MVS MWS Merging Structure-from-Motion Bundler by Noah Snavely Structure from Motion for unordered image collections WEB: http://phototour.cs.washington.edu/bundler/
System pipeline Image-based SFM MVS MWS Merging Multi-view Stereo PMVS by Yasutaka Furukawa and Jean Ponce Patch-based Multi-View Stereo Software/
System pipeline Image-based SFM MVS MWS Merging Manhattan-world Stereo
System pipeline Image-based SFM MVS Manhattan-world Stereo
System pipeline Image-based SFM MVS MWS Merging Manhattan-world Stereo Result
System pipeline Image-based SFM MVS MWS Merging Axis-aligned depth map merging (Paper contribution)
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Axis-aligned Depth-map Merging • Basic framework is similar to volumetric MRF
Axis-aligned Depth-map Merging • Basic framework is similar to volumetric MRF
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & dataUnary is often constant (inflation)
Key Feature 1 - Penalty terms • Weak regularization at interesting places • Focus on a dense model Binary penalty Binary encodes smoothness & dataUnary is often constant (inflation)
Key Feature 1 - Penalty terms • Weak regularization at interesting places • Focus on a dense model • We want a simple model Binary penalty Binary encodes smoothness & dataUnary is often constant (inflation)
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data Unary is often constant (inflation)
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data Unary is often constant (inflation)
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data Unary is often constant (inflation) Unary encodes data
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data Unary is often constant (inflation) Binary is smoothness Unary encodes data
Key Feature 1 - Penalty terms Binary penalty Regularization becomes weakDense 3D model Regularization is data-independent Simpler 3D model
Axis-aligned Depth-map Merging • Align-voxel grid withthe dominant axes
Axis-aligned Depth-map Merging • Align-voxel grid withthe dominant axes • Data term (unary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary) • Smoothness (binary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary) • Smoothness (binary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary) • Smoothness (binary) • Graph-cuts
Key Feature 2 – Regularization • For large scenes, data info are not complete • Typical volumetric MRFs bias to general minimal surface • We bias to piece-wise planar axis-aligned for architectural scenes
Key Feature 2 – Regularization Same energy (ambiguous)
Key Feature 2 – Regularization Same energy (ambiguous) Data penalty: 0
Key Feature 2 – Regularization Same energy (ambiguous) Data penalty: 0 Smoothness penalty: Data penalty: 0 Smoothness penalty: 24 Data penalty: 0
Key Feature 2 – Regularization shrinkage