Through-Wall Vision Project
Through-Wall Vision Project. Financement : FEDER / ANR. Bruno Lescalier , engineer , 09/2010 - …. Prototyping and Software development, participation in research. Projects : MODECOL : automatic recognition of grass. Throught-the-wall : Imaging, reduce of noise, target detection,….

Through-Wall Vision Project
E N D
Presentation Transcript
Through-Wall Vision Project Financement : FEDER / ANR
Bruno Lescalier, engineer, 09/2010 - … • Prototyping and Software development, participation in research. • Projects : • MODECOL : automatic recognition of grass. • Throught-the-wall : Imaging, reduce of noise, target detection,…
Team « Through-The-Wall Vision» • Recent structure in L3i: 2004 • With : • 2 Professors (M. Ménard, G. Louis) • 2 Lecturers (A. Gaugue, J. Khamlichi) • 2 PhD (O. Benahmed, X. Zhao) • 3 engineers (B. Lescalier, O. Chappe, V.Merelle) • Areas of expertise : • UWB (Ultra Wide Band) pulse device. • Signal processing : expertise in inverse filtering, deconvolution, decompositions,… • Processing and computer graphics / 3D. • Ongoingproject FEDER (2010/2011) / ANR (2011/2013)
Objectives of the Project • Development of a portable prototype : • Reliable detection of human presence in the building and enumeration. • Location kidnappers / hostages. • Tracking people movements. • Outline of the topology of place. • Detection of people in rubble.
Radar system Acquisition Antennas FPGA Localization Trilateration Targetsdetection CFAR Imaging Retroprojection 2D/3D Background substract Targetstracking Particularfilter Kalman Signal processing FPGA Reduce of noise Peakdetection FPGA Software development
Vincent Mérelle Research and development engineer: Embedded systems Digital electronics High speed data link Signal processing
Signal Acquisition module • FPGA (field programmable grid array) Virtex6 prototyping board. • Analog to Digital Converter board
Titre de thèseConception d’une chaîne d’acquisition et de traitement Radar ULB pour la détection de cibles mobiles derrière un mur Thesis title Designe of an acquisition and processing UWB radar chain for detection of moving targets behind the wall Xiaowei Zhao, PhD Currently in the 4th year of thesis (writing thesis manuscript) Supervisors: Michel Ménard, Alain Gaugue, Jamal Khamlichi
Trilateration Localization without wall: Time of arrival method (TOA) + Geometry method (analytical) Localization with wall: Time of arrival (TOA) method + Convergent method (digital)
Results Result
Mise en place de la chaîne de traitement de l’information d’un radar distribué pour la vision à travers les murs Throught-Wall imaging Omar BENAHMED DAHO 2ndyearPhDStudent omar.benahmed_daho@univ-lr.fr Supervisors : J.KHAMLICHI & M.MENARD & A.GAUGUE
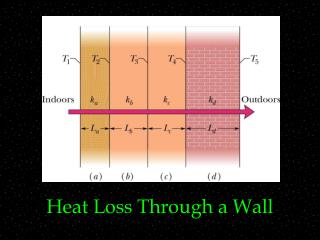
Through-Wall Imaging Radar • Block Diagram
Through-Wall Imaging Radar • Back-projection : • Based on Radon Transform (Medical Imaging) Temps
Through-Wall Imaging Radar • 3D Back-projection : Clément GUERIN
Through-Wall Imaging Radar • Steady/mobile Separation • Moving object segmentation using background subtraction. • Mobile Tracking • Steady inside walls,….
Through-Wall Imaging Radar • Some Results :
Olivier Chappe • Engineer R&D • Skills : • Image and Signal processing • C++ programming (with Qt, OpenGL, OpenCV)
Works in the project • Implementation of two software : • Software connected to the oscilloscope for testing our system in real-time. • Simulation Software. • Software use techniques explained earlier to detect target.
Works of Sloven Dubois • Target tracking algorithm • Kalman filtering