Download
1 / 35
350 likes | 374 Vues
Explore the spectral model for additive primary mixtures, computation of match amounts, color matching functions, and sensor concepts. Learn about trichromatic sensor models, color matching experiments, and examples of primary responses. Understand how to interpret sensor responses and match stimuli effectively.

E N D
ECE 638: Principles ofDigital Color Imaging Systems Lecture 5: Primaries
Synopsis • Brief review of sensor concepts • Spectral model for additive primary mixtures • Computation of match amounts • Transformation between primaries • Color matching functions
Review: development of chromaticity diagram • Shape of spectral response functions for sensor • Consider three example sensors • Spectral locus • Mixture stimuli • Polar coordinate interpretation of chromaticity coordinates • Chromaticity gamut • Spectral response functions for the HVS
Review: Trichromatic sensor model • are spectral response functions that characterize the sensor
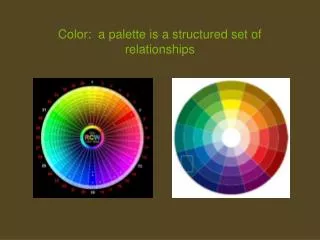
Review: Plane where R+G+B=1 • Represents points of roughly equal lightness • All colors that differ by a scalar multiple will intersect this plane at the same point
Review: polar coordinate representation of color • This suggests a polar coordinate interpretation of color • Origin of system is at center of chromaticity diagram – corresponding to intersection of neutral axis in RGB sensor space with chromaticity plane • Angle of chromaticity coordinate with respect to horizontal axis is a correlate of hue • Distance from origin is a correlate of saturation
Review: sensor with three channel overlap • Sensor response functions • Spectral locus
Primaries • Recall color matching experiment • In order to understand this process, we need to develop a spectral model for the match stimulus
Additive mixture of primaries • Consider a mixture of three primaries, each of which is described by its spectral density • The amounts of the three primaries are given by the constants • For convenience, we identify the primaries as R,G, and B. However, at this point, their corresponding spectral densities are completely arbitrary
What kinds of output devices can be modeled as additive? • Additive devices • CRT monitor • Rear projection TV • LCD • Of these three, only one is additive at the microscopic level • Which one is it? • Why? • How can we describe the others as being additive?
What kinds of output devices can be modeled as additive? • Additive devices • CRT monitor • Rear projection TV • LCD • Of these three, only one is additive at the microscopic level • Which one is it? • Why? • How can we describe the others as being additive? • Rear projection TV is additive, because light from three separate channels is superimposed • CRT monitor and LCD spatially multiplex the three primaries Sony Trinitron type shadow mask
Sensor response to additive primary mixture • Consider R channel response only
Sensor response (cont.) • The G and B channel responses can be expressed similarly • Define • Then we can write
Interpretation of the matrix A • The i-th row is the response of channel i to all three primaries. • The j-th column is the response of all three channels to primary j. • For color matching, it is important that A be nonsingular • The following three statements are equivalent: • A is nonsingular. • The 3-tuple response of one channel to all three primaries cannot be written as a linear combination of the 3-tuple responses of the other two channels to all three primaries. • The 3-tuple response of all three channels to one primary cannot be written as a linear combination of the 3-tuple responses of all three channels to the other two primaries.
Solution to color matching experiment • Response to test stimulus • Response to match stimulus • Match condition • Amount of each primary required for match
Example 1: three channel overlap sensor and monochromatic primaries • Sensor response functions • Primaries • Primary response matrix
Example 1 (cont.) • Sensor response functions and response to test stimulus • Test stimulus • Match amount of primaries
Interpretation for Example 1 • Response to test stimulus • Response to match stimulus Impulses are scaled up by 10x
Interpretation (cont.) • Since primary at 0.55 m, excites all three channels, might expect to use it alone. • However, it doesn’t provide same amount of excitation of R and B, relative to excitation of G, as does test stimulus. • Therefore, we add a small amount of primaries at 0.45 and 0.65 m to boost response of R and B. • However, G channel also responds to these primaries; so we must decrease amount of primary at 0.55 m to restore response in G channel to proper level. • But this also decreases excitation of R and B… • So we solve a set of simultaneous equations to get answer.
Example 2: Same sensor and primaries, but new test stimulus • Test stimulus • Response to test stimulus
Example 2 (cont.) • Match amount of primaries • Why is the amount of the primary at 0.45 m negative? • What is the physical meaning of this fact? Impulses are scaled up by 10x
Interpretation for example 2 • Test stimulus primarily stimulates R channel, but also stimulates G channel too. • Ratio of excitation of R channel relative to that of G channel by primary at 0.65 m (0.75:0.33) is greater than that for test stimulus (0.0625:0.0500) we need to use some of primary at 0.55 m to boost response of G channel. • But, primary at 0.55 m also excites B channel, whereas the test stimulus provides no excitation of B channel. • So we need a negative amount of the primary at 0.45 m to cancel the unwanted response of the B channel.
Physical meaning of the negative primary • Match is achieved by adding the negative primary to the test stimulus • This will desaturate the very red test stimulus
Transformation between sets of primaries • Consider two sets of primaries and and a test stimulus • Suppose we know that primary amounts yield a match with the RGB primaries to the test stimulus. • Can we find the match amount for the XYZ primaries to the same stimulus from a knowledge of without knowing ? • The answer is “yes” (under certain conditions on the primaries).
Color matching functions • We previously showed that we could express the response of a sensor to an arbitrary stimulus in terms of the response of that sensor to monochromatic stimuli at all wavelengths. • We similarly can express the 3-tuple primary amounts required to match any stimulus in terms of the primary amounts required to match all monochromatic stimuli.
Color matching functions (cont.) • Given primaries , let denote the amount of these primaries required to match the stimulus for each fixed wavelength . • Thus, we have • where , • the matrix is given as before, • and • Combining these results, we obtain
Example: three channel overlap sensor and monochromatic primaries • Sensor response functions • Primaries • Primary response matrix
Color matching functions for three channel overlap sensor Note that at wavelength 0.65 m, and we observe similar behavior at wavelengths 0.45 m and 0.55 m.
Use of color matching functions • Any arbitrary stimulus may be expressed as an additive mixture of monochromatic stimuli at wavelengths • By linearity of the sensor response, we can express the amount of the primaries required to match as
Sensor analogy • Note that the color matching functions play the role of sensor response functions with respect to the stimulus • Rather than yielding sensor responses to that stimulus, they yield amounts of the primaries required to match that stimulus when viewed by the sensor with response functions
Relation between sensor and color matching functions • Where does the sensor come into play here?
Relation between sensor and color matching functions (cont.) • Sensor subspace • Since color matching functions are a linear combination of the sensor response functions, the color matching function observer sees colors the same way as does the original sensor
Relation between color matching functions and sensor • Even if we cannot directly determine the sensor functions, we can directly measure the color matching functions