Agile Spectrum Imaging
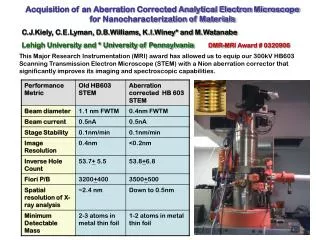
Agile Spectrum Imaging. Ankit Mohan, Jack Tumblin Northwestern University. Ramesh Raskar MERL / MIT. CIE 1931 chromaticity diagram. Fixed color primaries. sRGB color space. G. Fuji Velvia 50 film. Nikon D70 camera. R. B. Outside the color gamut. G. R = ? G = ? B = ?. R. B.

Agile Spectrum Imaging
E N D
Presentation Transcript
Agile Spectrum Imaging Ankit Mohan, Jack Tumblin Northwestern University Ramesh Raskar MERL / MIT
Fixed color primaries sRGB color space G Fuji Velvia 50 film Nikon D70 camera R B
Outside the color gamut G R = ? G = ? B = ? R B
Colorimetric or Photometric mapping G R ≈ 0.0 G ≈ 0.2 B ≈ 0.8 R B
400nm 550nm 700nm Wider color gamut G λ “Best” primaries compromise: Wide Gamut vs. High Power R B
Agile Spectrum • How do we do this? • What new applications can we get?
I x Ix λ 400nm 550nm 700nm Arbitrary white 1D signal C A B
x I I x Pinhole Camera C A’ B B’ A C’ Object Image Pinhole
x I C A’ B B’ C’ A Object Lens L1 Pinhole
x I C A’ B’ B C’ A Object Lens L1 Prism Pinhole
Prism λ A’ λ B’ x λ λ C’ x Spectral Light-Field
Light-Field Placing a 1D screen in a 2D light-field gives a 1D projection in a direction perpendicular to the screen.
x I Prism λ A’ λ B’ λ λ C’ x x I Screen p
x I λ A’ λ B’ λ λ C’ x I p
x I t = ∞ Prism p λ A’ λ B’ λ λ C’ I x t
x C’’ B’’ I A’’ Lens L2 Prism λ A’ λ B’ x λ C’ tS
x C’’ B’’ I A’’ Lens L2 λ A’ λ B’ x λ C’ tS t
x C’’ B’’ I A’’ Lens L2 λ A’ λ B’ x λ C’ tS tR t
C’’ B’’ A’’
I p Sensor plane (t=ts) C’’ B’’ λ x A’’ tS t
Rainbow plane (t=tR) p C’’ All rays of the a given wavelength, from all points in the scene, converge to a unique point in the R-plane. B’’ λ I x A’’ tR t
I x Ix λ 400nm 550nm 700nm Rainbow plane (t=tR) p λ I x
I x Rainbow plane (t=tR) p λ Ix λ I x 400nm 550nm 700nm
Rainbow plane (t=tR) p I x λ IR λ I x 400nm 550nm 700nm IB λ 400nm 550nm 700nm
Rainbow plane (t=tR) C’’ λ position B’’ A’’ tR t
Mask in the Rainbow plane C’’ λ x B’’ X 0 A’’ λ 1 tR t x
Mask in the Rainbow plane C’’ 0 B’’ λ x A’’ tR t
I p Mask in the Rainbow plane C’’ 0 B’’ λ x A’’ tR tS t
I p Mask in the Rainbow plane C’’ 0 B’’ λ x A’’ tR tS t
I p Mask in the Rainbow plane C’’ B’’ λ 0 x A’’ tR tS t
I p Mask in the Rainbow plane C’’ 0 B’’ λ 0 x A’’ tR tS t
Rainbow plane (t=tR) Control the spectral sensitivity of the sensor by placing an appropriate grayscale masks in the R-plane. C’’ B’’ A’’ tR tS t
Pinhole Sensor Lens L2 Lens L1 Scene C’’ A’ C B’ B B’’ C’ A A’’ R-plane mask Prism orDiffraction Grating
Pinhole Lens L1 Sensor Lens L2 Lens L1 Scene R-plane mask Prism orDiffraction Grating
Aperture and Lens L1 Sensor Lens L2 Scene R-plane mask Prism orDiffraction Grating
DiffractionGrating R-plane mask Lens L1 Lens L2 Sensor
Test Setup Spectral rainbow generator Agile Spectrum Camera
m(λ) λ 400nm 550nm 700nm m(λ) λ 400nm 550nm 700nm m(λ) λ 400nm 550nm 700nm Two opaque stripes No Mask One opaque stripe
m(λ) λ 400nm 550nm 700nm
m(λ) λ 400nm 550nm 700nm
DiffractionGrating R-plane mask Lens L1 Lens L2 Screen
Metamers White Illumination Monochromatic Illumination
Traditional three primary projector Agile-spectrumprojector