Download
1 / 8
100 likes | 143 Vues
Learn about the principles of DC motors, servo-drivers, and armature control, with a focus on mathematical modeling and system dynamics. Understand the key elements and torque calculations of DC motors.

E N D
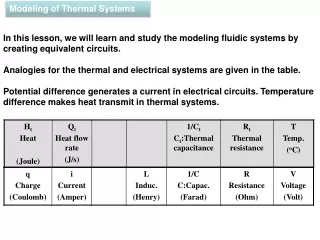
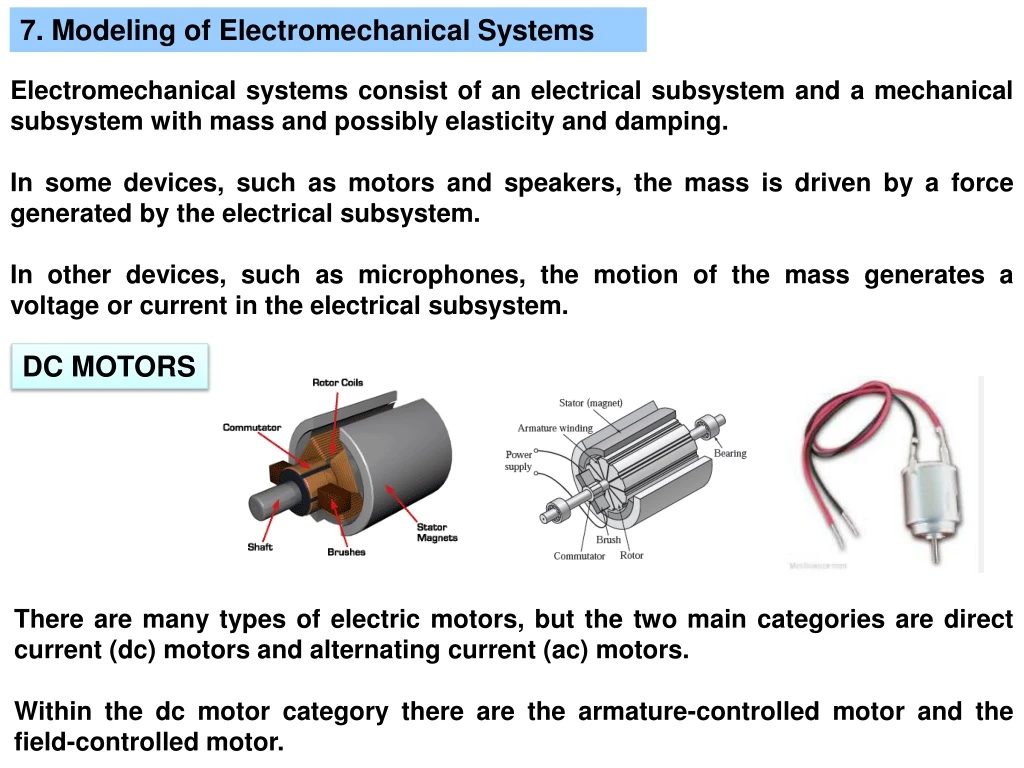
7. Modeling of Electromechanical Systems Electromechanical systems consist of an electrical subsystem and a mechanical subsystemwith mass and possibly elasticity and damping. In some devices, such as motors andspeakers, the mass is driven by a force generated by the electrical subsystem. In otherdevices, such as microphones, the motion of the massgenerates a voltage or current in the electrical subsystem. DC MOTORS There are many types of electric motors, but the two main categories are direct current(dc) motors and alternating current (ac) motors. Within the dc motor category thereare the armature-controlled motor and the field-controlled motor.
We aim to control the speed or motion of dc motors. There are many different types of servo-drivers. Most are designed to control the speed of dc motors, which improves the efficiency of operating servomotors. Here we shall discuss only armature control of a dc motor and obtain its mathematical model. Elements of DC Motor The basic elements of a motor, as shown in the Figure are the stator, therotor, the armature, and the commutator. The stator is stationary and provides the magneticfield. The rotor is an iron core that is supported by bearings and is free to rotate. The coils are attached to the rotor, and the combined unit is called the armature.
B F r Basic Principle of DC Motor The majority of electromechanical devices utilize a magnetic field. The basic principle of Dc motor is based on a wire carrying a current within a magnetic field: a force is exerted on the conductor by the field. Right Hand Rule for Magnetic Field The direction of the force (F) due to a magnetic field (B) is perpendicular to the direction of motion. We will use right hand rule to find the direction of the force of a magnetic field Tm: Motor torque (moment) The product of the magnetic force (F) and the radius (r) will generate the motor moment.
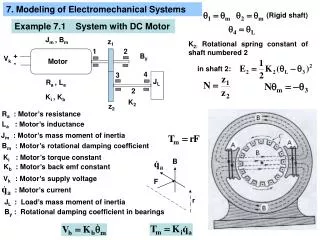
(Rigid shaft) z1 in shaft 2: By 4 3 Jm , Bm JL 2 1 2 + Vk K2 Motor - z2 Ra , La Ki , Kb : Motor’scurrent Example 7.1 System with DC Motor K2: Rotational spring constant of shaft numbered 2 Ra : Motor’s resistance La : Motor’s inductance The torque Tm developed by the motor is proportional to the product of Motor’s torque constantand the current . When the sign of the current is reversed, the sign of the torque will be reversed. Jm : Motor’s mass moment of inertia Bm : Motor’s rotational damping coefficient Ki : Motor’s torque constant Kb : Motor’s back emf constant Vk : Motor’s supply voltage JL : Load’s mass moment of inertia When the armature is rotating, thevoltage (backemf)Vb is directly proportional to the angular velocity of the motor. By : Rotational damping coefficient in bearings
(Rigid shaft) z1 In shaft 2 : By 4 3 Jm , Bm JL 2 1 2 + Vk K2 DC Motor - z2 Ra , La Ki , Kb Lagrange Equation→ Homework 07-Problem 1 Energy equations for Lagrange equation: Input : Vk ;Generalized variables : qa, θm, θL
x(t) k/2 Movable, m R b/2 Vk - + fa(t) C k/2 b/2 Fixed Example 7.2 Movable plate capacitor Vk is the power supply. Vk is connected to the lines with the resistor R and the capacitor C in serial. The plate of the capacitor at left hand side is fixed. The other plate is movable. The moving plate is fixed to the body with the elements of the spring k and damper c. are the constants. The force fa is applied to movable plate. The displacement of movable plate is x(t). The value of the capacitor depends on the changing of the distance between the plates changes. Inputs: Vk(t) ve fa(t) Generalized variables: q(t) ve x(t)
x(t) k/2 Movable, m R b/2 Vk - + fa(t) C k/2 b/2 Sabit Inputs: Vk(t) ve fa(t) Generalized variables: q(t) ve x(t) For the electromechanical system, We can write the energy and virtual work equation as follows.
Inputs: Vk(t) ve fa(t) x(t) k/2 Movable, m R b/2 Vk - + fa(t) C k/2 b/2 Sabit Generalized variables: q(t) ve x(t) The equations of motion of the system are obtained by applying the Lagrange equation to the general variables. Set of non-linear differential equations Runge-Kutta method Linearization Homework 07- Problem 2: Movable core inductance