Download
1 / 1
10 likes | 174 Vues
Réactif: champ de potentiel local. Robot à conduite différentielle Terrain de 128x128 mètres 21 sonars couvrant de -157.5⁰ à +157.5⁰ (séparation de 15 ⁰ ) Les sonars ont une portée de 10m . Le bût attire le robot (champ constant) Les obstacles repoussent le robot (champ linéaire)

E N D
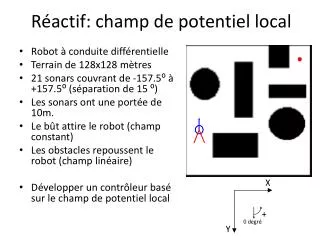
Réactif: champ de potentiel local • Robot à conduite différentielle • Terrain de 128x128 mètres • 21 sonars couvrant de -157.5⁰ à +157.5⁰ (séparation de 15 ⁰) • Les sonars ont une portée de 10m. • Le bût attire le robot (champ constant) • Les obstacles repoussent le robot (champ linéaire) • Développer un contrôleur basé sur le champ de potentiel local