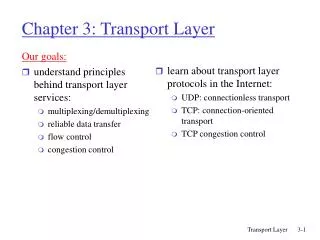
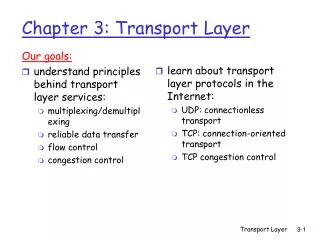
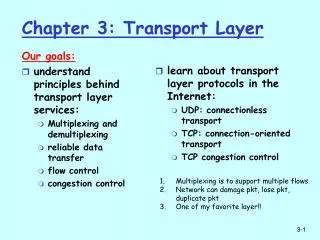
Unified Control and Data-Oriented Models for Real-Time Embedded Systems
10 likes | 129 Vues
This paper presents an innovative approach to the synthesis of real-time embedded systems by focusing on preserving observable properties during computation split and scheduling. Urgent control actions demand fast execution, while complex multimedia algorithms require significant processing time. We propose a model-driven design utilising POOSL and UML, emphasizing the preservation of properties up to an error margin (ε). Our findings support stronger observable property preservation through efficient scheduling, ensuring that computations are completed within their deadlines while maintaining correctness.

Unified Control and Data-Oriented Models for Real-Time Embedded Systems
E N D
Presentation Transcript
Property-Preservation Synthesis for Unified Control- and Data-Oriented Models† Oana Florescu, Jeroen Voeten, Henk Corporaal o.florescu@tue.nl Introduction • Actions - need small computation time (control action) -immediate (urgent) execution • Time-intensive computations - need considerable amount of execution time (multimedia algorithms) - finish before a deadline Model-driven design of real-time embedded systems [1] • suitable models for real-time analysis • correctness-preserving synthesis Current Approach From Model to Realisation [3] Real-Time Systems POOSL [2] Models UML model POOSL model Controller()() in?input(x); computation(x)(y); delay T; out!output(y). ε-closeness ε = max(ε1, ε2) Transition system • Preservation of all properties up to ε • Internal computations are not observed from outside • But they induce a largeε However • Only observable properties (of actions) are interesting • Computations need to be scheduled up to a deadline Model execution Proposed Approach Intuition • Computation split into small parts → small ε Mathematical support – observation equivalence • Models have the same observable properties • Implementations of both observation equivalent models preserve their observable properties, but with different strengths: splitting computations preemptive scheduling By scheduling computations, P is preserved stronger Conclusions • Abstract from unobservable computations which are scheduled to meet their deadlines • Time-deviations are given only by observable actions • Stronger preservation of observable properties References [1] J. Huang, J. Voeten, O. Florescu, P. vd Putten and H. Corporaal. Advances in Design and Specification Languages for SoCs, chapter Predictability in real-time system development. Kluwer Academic Publishers, 2005. [2] P. vd Putten and J. Voeten. Specification of Reactive Hardware/Software Systems. PhD thesis, Eindhoven University of Technology, Eindhoven NL, 1997. [3] J. Huang, J. Voeten and M. Geilen. Real-time property preservation in approximations of timed systems. 1st ACM & IEEE International Conference on Formal Methods and Models for Codesign (MEMOCODE'2003), June 2003. ε = max(ε1, ε2) ε’ = max(ε1, ε2, ε3, ε4) < ε †Research carried out as part of the BodeRC project. Department of Electrical Engineering Electronic Systems