La commande
La commande. Été 2010. Types de commande. Rétroaction (Feedback) P, PI, PD, PID Par « FeedForward » Commande prédictive Par cascade. La plus utilisée. Constituants d’une boucle de contrôle par rétroaction. Exemple - CSTR. Équations de l’exemple.

La commande
E N D
Presentation Transcript
La commande Été 2010
Types de commande • Rétroaction (Feedback) • P, PI, PD, PID • Par « FeedForward» • Commande prédictive • Par cascade La plus utilisée
Équations de l’exemple • Pour analyser les différentes stratégies de contrôle, analysons le système suivant (en Laplace):
Système CSTR • Équation différentielle correspondante:
Paramètres du système à étudier • V = 10 pi3; • F = 2.5 pi3/min; • ρCP = 61.3 BTU/pi3/°F; • Ti = 50°F • Tss = 60°F
Système CSTR avec les paramètres : • En régime permanent :
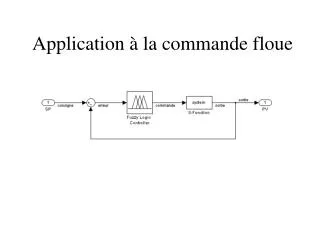
Fonction de transfert du procédé résultante • Voici le schéma bloc du système :
Fonctions de transfert en boucle fermée • Entrée vs sortie : • Perturbation vs sortie :
Car rapides Pour notre système(posant gv = h = 1) • Entrée vs sortie : • Perturbation vs sortie :
Contrôle proportionnel • Soit p(t) un signal pneumatique entre 3 et 15 psig (un signal électrique entre 4 et 20 mA) émis par le contrôleur. • Soit ps la valeur de commande qui fait en sorte que l’erreur ε(t) soit nulle.
Contrôle proportionnel (2) • Alors un contrôleur proportionnel aura comme équation : • Le signal de commande se définit comme étant :
Contrôle proportionnel (3) • La fonction de transfert résultante sera donc :
En pratique • Dans les contrôleurs industriels, ce n’est pas le gain proportionnel KP qui est ajusté, mais bien la bande proportionnelle PB. • Définition de PB:
Effets du contrôle proportionnel sur le CSTR • Entrée vs sortie : • Perturbation vs sortie :
Réponses Échelon de 1°F à t = 1 min
Réponses Échelon de 1°F à t = 1 min
Bilan • Le système en boucle fermée est stable. • Racine de l’équation caractéristique est réelle et inférieure à 0. (Kp>0)
Bilan (2) • Une erreur persiste entre la valeur de sortie en régime permanent et la consigne. • Seul un gain infini règle ce problème. • Pour certains systèmes, cette erreur n’est pas dramatique.
Bilan (3) • Une perturbation provoque une erreur non corrigée complètement par le contrôleur proportionnel.
Contrôle proportionnel-intégral • La représentation du signal p(t) est :
Contrôle PI (2) • La fonction de transfert résultante sera donc : Reset Rate
Effets du contrôle PI sur le CSTR • Entrée vs sortie : • Perturbation vs sortie :
Réponses Échelon de 1°F à t = 1 min KC = 10
Réponses Échelon de 1°F à t = 1 min KC = 10
Bilan • Le système en boucle fermée est stable sous certaines conditions. • Choix limité de KC et tI.
Bilan • Critère de Routh-Hurwitz.
Bilan (2) • Il n’y a plus d’erreur entre la valeur de sortie en régime permanent et la consigne.
Bilan (3) • Une perturbation provoque une erreur transitoire qui fini par disparaître complètement.
Contrôle proportionnel-dérivée • La représentation du signal p(t) est :
Contrôle PD (2) • La fonction de transfert résultante sera donc : Derivate time constant
Effets du contrôle PD sur le CSTR • Entrée vs sortie : • Perturbation vs sortie :
Réponses Échelon de 1°F à t = 1 min KC = 10
Réponses Échelon de 1°F à t = 1 min KC = 10
Bilan • Le système en boucle fermée est stable.
Bilan (2) • Comportement identique au cas proportionnel, mais l’effet de la partie dérivée est de ralentir le système.
Contrôle PID • La fonction de transfert du contrôleur
Effets du contrôle PD sur le CSTR • Entrée vs sortie : • Perturbation vs sortie :
Réponses Échelon de 1°F à t = 1 min KC = 10, tI = 1/4
Réponses Échelon de 1°F à t = 1 min KC = 10, tI = 1/4
Bilan • Le système en boucle fermée est stable sous certaines conditions. • Choix limité de KC , tIet tD.
Bilan (2) • L’ajout du terme dérivée ralenti le système et augmente la longueur de la période d’oscillation.
Contrôle d’un système instable en boucle ouverte • Soit le système suivant : • Le système à un pôle à +1/5 = 0.2 et est donc instable en boucle ouverte.
Contrôle P d’un système instable en boucle ouverte • En boucle fermée : • Si KC > 1, le système devient stable. • Un contrôleur P stabilise le système. • Erreur en régime permanent.
Contrôle PI d’un système instable en boucle ouverte • En boucle fermée : • Pas d’erreur en régime permanent • KC > 1
Technique par placement de pôles • Pour faire le design d’un contrôleur, on peut simplement fixer les pôles que l’on désire attribuer au système en boucle fermée.
Exemple - PI • Soit la fonction de transfert du CSTR avec contrôle PID. • Le dénominateur étant du deuxième ordre, on peut choisir de placer les pôles en p1 et p2.