Download
1 / 45
450 likes | 558 Vues
This lecture series by François Fages delves into formal approaches in biology, focusing on cell modeling using BIOCHAM. Topics covered include formal biological properties represented in temporal logic, symbolic model-checking, and continuous dynamics. The course also explores computational models of cell cycle control, the application of machine learning in reaction rules, and constraint-based model checking. By using temporal logic CTL, various biological properties and reachability questions are formalized, providing insights into cell behavior and decision-making processes.

E N D
Formal Biology of the CellModeling, Computing and Reasoning with ConstraintsFrançois Fages, Constraints Group, INRIA Rocquencourtmailto:Francois.Fages@inria.frhttp://contraintes.inria.fr/
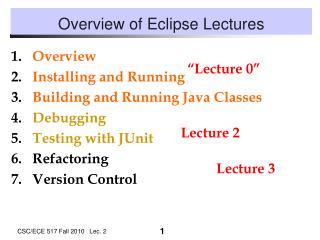
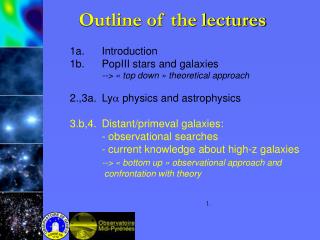
Overview of the Lectures • Introduction. Formal molecules and reactions in BIOCHAM. • Formal biological properties in temporal logic. Symbolic model-checking. • Continuous dynamics. Kinetics models. • Computational models of the cell cycle control. • Abstract interpretation of biochemical models. • Machine learning reaction rules from temporal properties. • Constraint-based model checking. Learning kinetic parameter values. • Constraint Logic Programming approach to protein structure prediction.
Map of Course 2 • Temporal logic CTL as a language for formalizing biological properties • CTL formulas: syntax and semantics • Biological properties formalized in CTL • Example of the cell cycle control • Symbolic Model checking algorithm • Computational results • About oscillations
E, A Non-determinism AG EU EF F,G,U Time Computation Tree Logic CTL • CTL [Clarke & al. 99] extends classical logic with modal operators:
Biological Properties formalized in CTL (1/3) • Aboutreachability: • Can the cell produce some protein P? reachable(P)==EF(P)
Biological Properties formalized in CTL (1/3) • Aboutreachability: • Can the cell produce some protein P? reachable(P)==EF(P) • Can the cell produce P, Q and not R? reachable(P^Q^R)
Biological Properties formalized in CTL (1/3) • Aboutreachability: • Can the cell produce some protein P? reachable(P)==EF(P) • Can the cell produce P, Q and not R? reachable(P^Q^R) • Can the cell always produce P? AG(reachable(P))
Biological Properties formalized in CTL (1/3) • Aboutreachability: • Can the cell produce some protein P? reachable(P)==EF(P) • Can the cell produce P, Q and not R? reachable(P^Q^R) • Can the cell always produce P? AG(reachable(P)) • Aboutpathways: • Can the cell reach a (partially described) set of states s while passing by another set of states s2? EF(s2^EFs)
Biological Properties formalized in CTL (1/3) • Aboutreachability: • Can the cell produce some protein P? reachable(P)==EF(P) • Can the cell produce P, Q and not R? reachable(P^Q^R) • Can the cell always produce P? AG(reachable(P)) • Aboutpathways: • Can the cell reach a (partially described) set of states s while passing by another set of states s2? EF(s2^EFs) • Is it possible to produce P without Q? E(Q U P)
Biological Properties formalized in CTL (1/3) • Aboutreachability: • Can the cell produce some protein P? reachable(P)==EF(P) • Can the cell produce P, Q and not R? reachable(P^Q^R) • Can the cell always produce P? AG(reachable(P)) • Aboutpathways: • Can the cell reach a (partially described) set of states s while passing by another set of states s2? EF(s2^EFs) • Is it possible to produce P without Q? E(Q U P) • Is (set of) state s2 a necessary checkpoint for reaching (set of) state s? • checkpoint(s2,s)== E(s2U s)
Biological Properties formalized in CTL (1/3) • Aboutreachability: • Can the cell produce some protein P? reachable(P)==EF(P) • Can the cell produce P, Q and not R? reachable(P^Q^R) • Can the cell always produce P? AG(reachable(P)) • Aboutpathways: • Can the cell reach a (partially described) set of states s while passing by another set of states s2? EF(s2^EFs) • Is it possible to produce P without Q? E(Q U P) • Is (set of) state s2 a necessary checkpoint for reaching (set of) state s? • checkpoint(s2,s)== E(s2U s) • Is s2 always a checkpoint for s? AG(s-> checkpoint(s2,s))
Biological Properties formalized in CTL (2/3) • Aboutstationarity: • Is a (set of) state s a stable state? stable(s)== AG(s)
Biological Properties formalized in CTL (2/3) • Aboutstationarity: • Is a (set of) state s a stable state? stable(s)== AG(s) • Is s a steady state (with possibility of escaping) ? steady(s)==EG(s)
Biological Properties formalized in CTL (2/3) • Aboutstationarity: • Is a (set of) state s a stable state? stable(s)== AG(s) • Is s a steady state (with possibility of escaping) ? steady(s)==EG(s) • Can the cell reach a stable state s? EF(stable(s)) not in LTL
Biological Properties formalized in CTL (2/3) • Aboutstationarity: • Is a (set of) state s a stable state? stable(s)== AG(s) • Is s a steady state (with possibility of escaping) ? steady(s)==EG(s) • Can the cell reach a stable state s? EF(stable(s)) not in LTL • Must the cell reach a stable state s? AG(stable(s))
Biological Properties formalized in CTL (2/3) • Aboutstationarity: • Is a (set of) state s a stable state? stable(s)== AG(s) • Is s a steady state (with possibility of escaping) ? steady(s)==EG(s) • Can the cell reach a stable state s? EF(stable(s)) not in LTL • Must the cell reach a stable state s? AG(stable(s)) • What are the stable states? Not expressible in CTL. Needs to combine CTL with search [Chan 00, Calzone-Chabrier-Fages-Soliman 05].
Biological Properties formalized in CTL (3/3) • Aboutoscillations: • Can the system exhibit a cyclic behavior w.r.t. the presence of P ? oscil(P)== EG((P EF P) ^ (P EF P)) • (necessary but not sufficient condition without strong fairness)
Biological Properties formalized in CTL (3/3) • Aboutoscillations: • Can the system exhibit a cyclic behavior w.r.t. the presence of P ? oscil(P)== EG((P EF P) ^ (P EF P)) • (necessary but not sufficient condition without strong fairness) • Can the system loops between states s and s2 ? • loop(P,Q)== EG((s EF s2) ^ (s2 EF s))
Biological Properties formalized in CTL (3/3) • Aboutoscillations: • Can the system exhibit a cyclic behavior w.r.t. the presence of P ? oscil(P)== EG((P EF P) ^ (P EF P)) • (necessary but not sufficient condition without strong fairness) • Can the system loops between states s and s2 ? • loop(P,Q)== EG((s EF s2) ^ (s2 EF s)) • About durations: • How long does it take for a molecule to become activated? • In a given time, how many Cyclins A can be accumulated? • What is the duration of a given cell cycle’s phase?
Biological Properties formalized in CTL (3/3) • Aboutoscillations: • Can the system exhibit a cyclic behavior w.r.t. the presence of P ? oscil(P)== EG((P EF P) ^ (P EF P)) • (necessary but not sufficient condition without strong fairness) • Can the system loops between states s and s2 ? • loop(P,Q)== EG((s EF s2) ^ (s2 EF s)) • About durations: • How long does it take for a molecule to become activated? • In a given time, how many Cyclins A can be accumulated? • What is the duration of a given cell cycle’s phase? • CTL operators abstract from durations. Time intervals can be modeled in FOL by adding numerical constraints for start times and durations.
MAPK Signaling Pathway in BIOCHAM • RAF + RAFK <=> RAF-RAFK. • RAF-RAFK => RAFK + RAF~{p1}. • RAF~{p1} + RAFPH <=> RAF~{p1}-RAFPH. • RAF~{p1}-RAFPH => RAF + RAFPH. • MEK~$P + RAF~{p1} <=> MEK~$P-RAF~{p1} • where p2 not in $P. • MEK~{p1}-RAF~{p1} => MEK~{p1,p2} + RAF~{p1}. • MEK-RAF~{p1} => MEK~{p1} + RAF~{p1}. • MEKPH + MEK~{p1}~$P <=> MEK~{p1}~$P-MEKPH. • MEK~{p1}-MEKPH => MEK + MEKPH. • MEK~{p1,p2}-MEKPH => MEK~{p1} + MEKPH. • MAPK~$P + MEK~{p1,p2} <=> MAPK~$P-MEK~{p1,p2} • where p2 not in $P. • MAPKPH + MAPK~{p1}~$P <=> MAPK~{p1}~$P-MAPKPH. • MAPK~{p1}-MAPKPH => MAPK + MAPKPH. • MAPK~{p1,p2}-MAPKPH => MAPK~{p1} + MAPKPH. • MAPK-MEK~{p1,p2} => MAPK~{p1} + MEK~{p1,p2}. • MAPK~{p1}-MEK~{p1,p2}=>MAPK~{p1,p2}+MEK~{p1,p2}.
Bipartite Proteins-Reactions Graph of MAPK GraphViz http://www.research.att.co/sw/tools/graphviz
Temporal Logic Querying of MAPK Signaling Pathway • MEK~{p1} is a checkpoint for the cascade, i.e. producing MAPK~{p1,p2} • biocham: checkpoint(MEK~{p1} , MAPK~{p1,p2}) • !E(!MEK~{p1} U MAPK~{p1,p2}) is True • The PH complexes are not checkpoints • biocham: checpoint(MEK~{p1}-MEKPH , MAPK~{p1,p2}) • !E(!MEK~{p1}-MEKPH U MAPK~{p1,p2}) is false • Step 1 rule 15 • Step 2 rule 1 RAF-RAFK present • Step 3 rule 21 RAF~{p1} present • Step 4 rule 5 MEK-RAF~{p1} present • Step 5 rule 24 MEK~{p1} present • Step 6 rule 7 MEK~{p1}-RAF~{p1} present • Step 7 rule 23 MEK~{p1,p2} present • Step 8 rule 13 MAPK-MEK~{p1,p2} present • Step 9 rule 27 MAPK~{p1} present • Step 10 rule 15 MAPK~{p1}-MEK~{p1,p2} present • Step 11 rule 28 MAPK~{p1,p2} present
Semantics of CTL: Kripke structures • A Kripke structure K is a triple (S,R) where S is a set of states, and RSxS is a total relation. • s |= f if propositional formula f is true in s, • Following [Emerson 90] we identify a formula f to the set of states which satisfy it f ~ {sS : s |= f}.
Kripke Semantics of CTL • A Kripke structure K is a triple (S,R) where S is a set of states, and RSxS is a total relation. • s |= f if propositional formula f is true in s, • s |= E f if there is a path from s such that |= f, • Following [Emerson 90] we identify a formula f to the set of states which satisfy it f ~ {sS : s |= f}.
Kripke Semantics of CTL • A Kripke structure K is a triple (S,R) where S is a set of states, and RSxS is a total relation. • s |= f if propositional formula f is true in s, • s |= E f if there is a path from s such that |= f, • s |= A f if for every path from s, |= f, • Following [Emerson 90] we identify a formula f to the set of states which satisfy it f ~ {sS : s |= f}.
Kripke Semantics of CTL • A Kripke structure K is a triple (S,R) where S is a set of states, and RSxS is a total relation. • s |= f if propositional formula f is true in s, • s |= E f if there is a path from s such that |= f, • s |= A f if for every path from s, |= f, • |= f if s |= f where s is the starting state of , • Following [Emerson 90] we identify a formula f to the set of states which satisfy it f ~ {sS : s |= f}.
Kripke Semantics of CTL • A Kripke structure K is a triple (S,R) where S is a set of states, and RSxS is a total relation. • s |= f if propositional formula f is true in s, • s |= E f if there is a path from s such that |= f, • s |= A f if for every path from s, |= f, • |= f if s |= f where s is the starting state of , • |= X f if 1 |= f, • Following [Emerson 90] we identify a formula f to the set of states which satisfy it f ~ {sS : s |= f}.
Kripke Semantics of CTL • A Kripke structure K is a triple (S,R) where S is a set of states, and RSxS is a total relation. • s |= f if propositional formula f is true in s, • s |= E f if there is a path from s such that |= f, • s |= A f if for every path from s, |= f, • |= f if s |= f where s is the starting state of , • |= X f if 1 |= f, • |= F f if there exists k ≥ 0 such that k |= f, • Following [Emerson 90] we identify a formula f to the set of states which satisfy it f ~ {sS : s |= f}.
Kripke Semantics of CTL • A Kripke structure K is a triple (S,R) where S is a set of states, and RSxS is a total relation. • s |= f if propositional formula f is true in s, • s |= E f if there is a path from s such that |= f, • s |= A f if for every path from s, |= f, • |= f if s |= f where s is the starting state of , • |= X f if 1 |= f, • |= F f if there exists k ≥ 0 such that k |= f, • |= G f if for every k ≥ 0, k |= f, • Following [Emerson 90] we identify a formula f to the set of states which satisfy it f ~ {sS : s |= f}.
Kripke Semantics of CTL • A Kripke structure K is a triple (S,R) where S is a set of states, and RSxS is a total relation. • s |= f if propositional formula f is true in s, • s |= E f if there is a path from s such that |= f, • s |= A f if for every path from s, |= f, • |= f if s |= f where s is the starting state of , • |= X f if 1 |= f, • |= F f if there exists k ≥ 0 such that k |= f, • |= G f if for every k ≥ 0, k |= f, • |= f1 U f2 iff there exists k>0 such that k |= f for all j < k j |= f. • Following [Emerson 90] we identify a formula f to the set of states which satisfy it f ~ {sS : s |= f}.
Basic Model-Checking Algorithm • Model Checking is an algorithm for computing, in a given finite Kripke structure K the set of states satisfying a CTL formula: • {sS : s |= f}. • Represent K as a (finite) graph and iteratively label the nodes with the subformulas of f which are true in that node. • Add f to the states satisfying f
Basic Model-Checking Algorithm • Model Checking is an algorithm for computing, in a given finite Kripke structure K the set of states satisfying a CTL formula: • {sS : s |= f}. • Represent K as a (finite) graph and iteratively label the nodes with the subformulas of f which are true in that node. • Add f to the states satisfying f • Add EF f(EX f) to the (immediate) predecessors of states labeled by f
Basic Model-Checking Algorithm • Model Checking is an algorithm for computing, in a given finite Kripke structure K the set of states satisfying a CTL formula: • {sS : s |= f}. • Represent K as a (finite) graph and iteratively label the nodes with the subformulas of f which are true in that node. • Add f to the states satisfying f • Add EF f(EX f) to the (immediate) predecessors of states labeled by f • Add E(f1 U f2 ) to the predecessor states of f2 while they satisfy f1
Basic Model-Checking Algorithm • Model Checking is an algorithm for computing, in a given finite Kripke structure K the set of states satisfying a CTL formula: • {sS : s |= f}. • Represent K as a (finite) graph and iteratively label the nodes with the subformulas of f which are true in that node. • Add f to the states satisfying f • Add EF f(EX f) to the (immediate) predecessors of states labeled by f • Add E(f1 U f2 ) to the predecessor states of f2 while they satisfy f1 • Add EG f to the states for which there exists a path leading to a non trivial strongly connected component of the subgraph of states satisfying f.
Basic Model-Checking Algorithm • Model Checking is an algorithm for computing, in a given finite Kripke structure K the set of states satisfying a CTL formula: • {sS : s |= f}. • Represent K as a (finite) graph and iteratively label the nodes with the subformulas of f which are true in that node. • Add f to the states satisfying f • Add EF f(EX f) to the (immediate) predecessors of states labeled by f • Add E(f1 U f2 ) to the predecessor states of f2 while they satisfy f1 • Add EG f to the states for which there exists a path leading to a non trivial strongly connected component of the subgraph of states satisfying f. • Thm. CTL model checking is P-complete, model checking alg in O(|K|*|f|).
Symbolic Model-Checking • Still for finite Kripke structures, use boolean constraints to represent • sets of states as a boolean constraint c(V) • the transition relation as a boolean constraint r(V,V’) • Binary Decision Diagrams BDD [Bryant 85] provide canonical forms to Boolean formulas (decide Boolean equivalence, TAUT is co-NP) • (x⋁¬y)⋀(y⋁¬z)⋀(z⋁¬x) • and • (x⋁¬z)⋀(z⋁¬y)⋀(y⋁¬x) • are equivalent, they • have the same BDD(x,y,z)
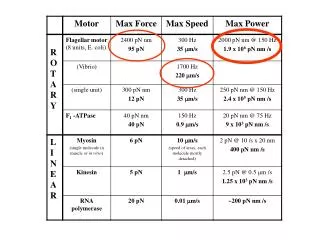
Cell Cycle: G1 DNA Synthesis G2 Mitosis • G1: CdK4-CycD S: Cdk2-CycA G2,M: Cdk1-CycA • Cdk6-CycD Cdk1-CycB (MPF) • Cdk2-CycE
Kohn’s map detail for Cdk2 • Complexation with CycA and CycE • Biocham Rules: • cdk2~$P + cycA-$C => cdk2~$P-cycA-$C • where $C in {_,cks1} . • cdk2~$P + cycE~$Q-$C => cdk2~$P-cycE~$Q-$C • where $C in {_,cks1} . • p57 + cdk2~$P-cycA-$C => p57-cdk2~$P-cycA-$C • where $C in {_, cks1}. • cycE-$C =[cdk2~{p2}-cycE-$S]=> cycE~{T380}-$C • where $S in {_, cks1} and $C in {_, cdk2~?, cdk2~?-cks1} • Total: 147 rule patterns 2733 expanded rules [Chiaverini Danos 03]
Mammalian Cell Cycle Control Benchmark • 147-2733 rules, 165 proteins and genes, 500 variables, 2500 states. • BIOCHAM NuSMV model-checker time in seconds:
Oscillations • EG((P EF P) ^ (P EF P)) • Necessary but not sufficient condition for oscillations without fairness: • Same with weak fairness: (no rule staying continuously fireable without being fired) • Needs strong fairness: no rule is infinitely often fireable without being fired
Oscillations • EG((P EF P) ^ (P EF P)) • Necessary but not sufficient condition for oscillations without fairness: • P P • Same with weak fairness: no rule stays continuously fireable without being fired • Needs strong fairness: no rule is infinitely often fireable without being fired
Oscillations • EG((P EF P) ^ (P EF P)) • Necessary but not sufficient condition for oscillations without fairness: • P P • Same with weak fairness: no rule stays continuously fireable without being fired • P P • P,Q • Needs strong fairness: no rule is infinitely often fireable without being fired