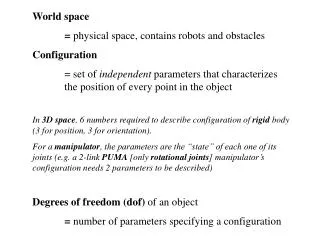
Toward Optimal Configuration Space Sampling
Toward Optimal Configuration Space Sampling. Presented by: Yan Ke. Sampling Problem. Tool: Sample points. Target: Construct a roadmap representing the complete connectivity of the configuration space. More Points ≠ Better Sampling. How to Sample Smartly?.

Toward Optimal Configuration Space Sampling
E N D
Presentation Transcript
Toward Optimal Configuration Space Sampling Presented by: Yan Ke NUS CS5247
Sampling Problem • Tool: Sample points. • Target: Construct a roadmap representing the complete connectivity of the configuration space. NUS CS5247
More Points ≠ Better Sampling NUS CS5247
How to Sample Smartly? • Complete knowledge of configuration Space (usually unavailable). • Using information from past experience (our approach). NUS CS5247
Modeling Configuration Space Section 1 NUS CS5247
Build a Model from Past Exp. • Machine learning is concerned with how to automate learning from experience. • An existing obstructed node indicates being his neighbors, you are also likely to be obstructed. • And vise versa. NUS CS5247
Probability for a single node • P(q=i | M) q – newly sampled point i – 1(free) or 0 (obstructed) M– Model built from past experience • We are learning P base on M. • We want : P(q=1 | M)↑ NUS CS5247
Basic Idea • Model configuration space as binary classification: C(p) = (0,1) • If q is p’s neighbor, C(p) = 1 P(q=1 | M)↑ C(p) = 0 P(q=1 | M)↓ NUS CS5247
Approximation Function • DenoteĈ(q) = P(q=1 | M) • Obviously Ĉ(q)[0,1] NUS CS5247
K-nearest Neighbors • Q = { qi | i = 1,2……n} • N(q,k) – The function provides the k-nearest neighbors in Q. • Ĉ(q) = NUS CS5247
A Screen Shot from the Paper NUS CS5247
Probabilities • P(q=1 | M) = Ĉ(q) • P(q=0 | M) = 1 - Ĉ(q) NUS CS5247
Utility Function Section 2 NUS CS5247
Utility Function • Purpose: Characterize the relevance of a configuration to successfully guide sampling. • Relevance of a configuration: • Unexplored regions near to existing roadmap components? • maximally distance from existing components in unexplored regions of configuration space? NUS CS5247
Utility Function • U(q=i , R) q – newly sampled point i – 1(free) or 0 (obstructed) R– the roadmap NUS CS5247
Information Gain • IG(S,K) = H(S) – H(S|K) • S – some system • K – new knowledge • H() – entropy function • As S getting more information, H(S)↓ NUS CS5247
Utility Function • U(q=i , R) = IG (R,q) =H(R) – H(R|q) • We claim that an obstructed sample doesn’t provide us any IG • i.e. U(q=i , R) = 0 NUS CS5247
Another Screen Shot NUS CS5247
How to get around it? • Return to our very basic goal: Full Connectivity • We restrict our current roadmap to be a set of disjoint component. • The maximal IG is likely to appear near the middle point of two large disjoint components. NUS CS5247
Utility-Guided Sampling Section 3 NUS CS5247
Utility-Guided Sampling NUS CS5247
Algorithm: NUS CS5247
Experiment • Environment: Two workspaces with robots of varying degrees of freedom. • Each robot – 3-4 links. • Each joint – 3 degrees of freedom. • Total – 9 or 12 DOF NUS CS5247
Result: Faster NUS CS5247
Conclusion • Utility-Guided Sampling • Guiding sampling to more relevant configurations. • Experimentally proved to be efficient NUS CS5247