Download
1 / 23
230 likes | 382 Vues
ANCHOR Synergies with Global-scale efforts. Bruce M. Howe Acoustic Navigation and Communication for High-latitude Ocean Research (ANCHOR) Workshop Applied Physics Laboratory, University of Washington, 27 February – 1 March 2006. Outline of Talk. A little history and background

E N D
ANCHORSynergies with Global-scale efforts Bruce M. Howe Acoustic Navigation and Communication for High-latitude Ocean Research (ANCHOR) Workshop Applied Physics Laboratory, University of Washington, 27 February – 1 March 2006
Outline of Talk • A little history and background • ASA Integrated Acoustics Systems for Ocean Observatories • GPS • ORION status • ORION acoustics • Connection to ANCHOR
History • Sun, moon, stars, terrain/feature tracking • Compass, sextant and variants • Time – longitude • Time standards – 1930s Einstein’s predictions of effect of gravity on time. Nobel Prizes: Rabi 1944 atomic resonance; Ramsey 1989 hydrogen masers • Radio, loran, mini-ranger, … • Satellites • Sputnik – Doppler navigation • Transit satellites 1965 (a few fixes/day, 15 min integration) for Polaris subs • GPS – one Sept weekend, 1973, full coverage time and space • Deep space network – nav and comms -> deep space internet, infrastructure around Mars, occultations • Underwater – SOSUS, Navy ranges, LBL, FLBL, Swallow/SOFAR/RAFOS/mobile/tomography
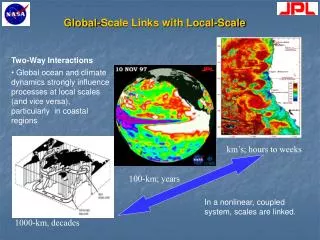
Acoustics in Ocean Observatories • Acoustic methods will be ubiquitous in ocean observing • Ocean is transparent to sound, but largely opaque to electromagnetic radiation • Provides synoptic, volumetric sampling • Cross cuts across many disciplines – opportunities for synergies and integration
Integrated Acoustics Systems for Ocean Observatories (IASOO) Acoustics centric! ASA-AO committee 2003 Unified architecture across all scales
IASOO Concepts • Acoustic sources act as “GPS satellites” underwater to provide signals for • Navigation • Communication • Science • Receivers on all platforms • Simultaneously • Ambient sound (wind, rain, seismic, whales, shipping, …) • Tomography • Others • 2-way communications as appropriate • Manage the acoustic spectrum – all users • Unified architecture across all scales
ORION Workshop ice • Jan 2004 Puerto Rico • Recognized as part of observing system
Projection slice theorem Norton: – if sensors only on periphery, only get vorticity, not divergence
Global Navigation Satellite Systems GPS Glonass Galileo --------------- 60–90 sources in space
GEONET Maps of Precipitable Water (PW) Japanese Meteorological Agency, 2003
GPS Experience • Huge user base has evolved • >3000 science receivers – international data centers • GPS Navigation message • 50 b/s, 20% parity bits, 1 of 10 words for sync, 30 s • Clock correction • Ephemeris (orbits/position/velocity) • Ionospheric correction parameters • UTC information • Almanac • Differential measurements, WAAS, quality, …
Major NSF Ocean Sciences Program started 2004 • Infrastructure MRE funds $309M in FY2007!!! • PLUS all science, O&M, DMAS, E&O, … 30 years • www.orionprogram.org
Elements • Sustained presence – research and operations – power and comms (x,t) • Three Components • Regional, cabled + • Coastal, cabled, moor, + • Global, Moorings NSF ORION IOOS
Distributed sensor systemNavy example • Environmental assessment defines cluster topology and fixed/mobile mix • Fixed and mobile sensor nodes deployed for optimum coverage. AUV’s enter semi-dormant state as temporarily fixed or drifting nodes • Reconfigure mobile sensor nodes based on current environmental situation • Event detection communicated to network (ACOMMS or RF) • Mobile platforms respond
Mid-2006 Mid-2006 Late 2005 NEPTUNE – in progress • NEPTUNE Canada • Install summer 2007 • 2-4 nodes, to Endeavor • Loop design • CDN$40M • With Alcatel • Test beds • MARS and VENUS
ORION RFA concept proposals • 5 major acoustic, 12 others, 17 acoustic out of 48 total – ORION recognizes acoustic components • Worcester et al.: Thermometry, support navigation, ambient sound, t-phase • Duda et al.: float tracking (process studies) and thermometry • Detrick et al: geophysical, called for bottom/sofar hydrophone, Stephen et al – sofar t-phase • Daly et al., Barth et al.,: NEPTUNE/coastal multipurpose mooring array, tomography • Horne/fish/mammals • Bioacoustics observatory/hawaii • 3 ambient sound (1 with CO2) • Small scale tomo/vents • Many with gliders and AUVs with navigation implied
Daly et al. • Water column oceanography
Worcester et al • Thermometry • Also navigation
Duda et al • Precise float tracking • Dispersion • Meridional overturning • Thermometry
Alternate Source Test (AST) • 28 and 84 Hz • Simultaneous signals, phase locked (3rd harmonic) • Source from DP ship, DGPS • Deployed in deep water near Pioneer Seamount, 1995
Main Points • Applicable to all cases: • Timing is fundamental • Navigation implies communications • Tomography results (sound speed and velocity) • All signal compatible • Ambient noise – spectrum, marine animals • GPS is a good analogy • Work to inexpensive receiver • Modeling and data assimilation crucial – start/continue now • Equipment needs (Arctic and lower latitudes) are similar • Arctic Data N ~ S x R, say S = 5(6) • Fixed N = (5 x 4) / 2 = 10 (15) • Add 16 tethered (x,t known), add N = 5 x 16 = 80 (96) • Add 32 mobile (x,t unknown), add N = (5-3) x 32 = 64 (96) • Total – 154 (207) independent ocean samples each ping
Path • Need roadmap • More funding! • Next MREs, other, … • Expect 10 years for big chunks – BUT play up short, critical time frame