Project Status Update P10661-Aerial Imaging
180 likes | 371 Vues
Dale Turley ( Mech ). Project Status Update P10661-Aerial Imaging. Project Status Update. Project Name Aerial Imaging System Project Number P10661 Project Family Open Architecture, Open Source Aerial Imaging Systems Track Printing and Imaging

Project Status Update P10661-Aerial Imaging
E N D
Presentation Transcript
Dale Turley (Mech) Project Status UpdateP10661-Aerial Imaging
Project Status Update • Project Name Aerial Imaging System • Project Number P10661 • Project Family Open Architecture, Open Source Aerial Imaging Systems • Track Printing and Imaging • Start Term 2009-1 planned academic quarter for MSD1 • End Term 2009-2 planned academic quarter for MSD2 • Faculty Guide Dr. Pratapa Reddy, Professor in Computer Engineering • Tech Support Gerry Garavuso • Primary Customer Dr. Carl Salvaggio, College of Imaging Science
Mission Statement Frame The overall product is a visible spectrum imaging system for the use with an unmanned aerial vehicle. The specific task under development is an image calibration system and procedure to be used by researchers in the College of Imaging Science, to effectively and efficiently collect surface data. Camera Control Power Supply
Project Relevance Primary Customer: RIT College of Imaging Science • Imaging scientists need this product because: • Expensive to operate current systems (~$8000/mission) • Current imaging systems are large and need to be carried by small single engine airplanes and helicopters • The imaging system in conjunction with the UAV frame P10332 project will give researchers the freedom to launch and collect data on demand.
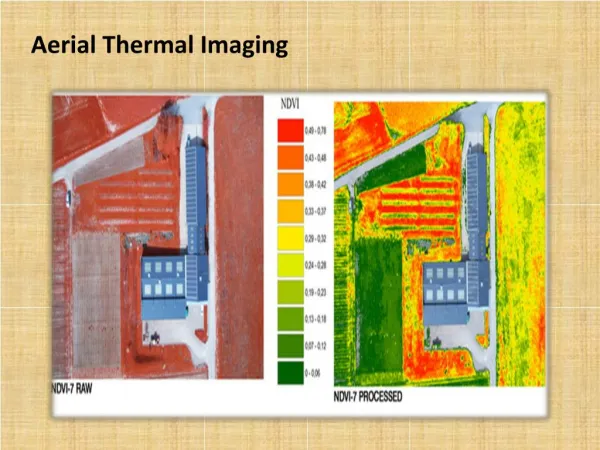
Visible Calibration Radiometric calibration of camera using NIST lamp of known intensity Calibration of the camera allows for the measurement of power of electromagnetic radiation at a surface, this is called spectral irradiance. Irradiance due to solar energy is call insolation. Insolation is a measure of solar radiation energy received on a given surface area in a given time. When looking at a surface on the earth, this is the amount of solar energy that is reflected by the surface.
Applications of the Device • In construction used to predict building energy efficiency • Crop yields • To design buildings that are cool in summer and warm in winter • Location and size for solar power systems • Mosaic images to create a very high resolution map of a large area • Take thermal images to aid in putting out forest fires • Detection of warm bodies for search and rescue
Required Resources Tech Support – Dr. Reddy CE People Tech Support – Dr. Salvaggio CIS MSD Workspace 4th Floor Places LIAS LAB DIRS LAB Access to PRO-E CAD Things WASP, MISI
Objective Tree UAV Imaging System Structure Scope Economics Technical Mechanical Engineering Imaging Science Robust Useful for researchers Useful for public safety agencies Low production cost Rugged Observation Information Frame Imaging Theory Measurements Low usage cost Electrical Engineering Computer Engineering Inexpensive Low maintenance cost Software Simple Power Storage
Function Tree UAV Imaging System Calibration Data Storage Software System Hardware System Quality of Data Processing Power Capacity Reliability Camera System Software System Camera Controls Subsystem Controls User Interface Visible Thermal IR Short Wave Long Wave Stable Power Provide Power for Entire Flight
Moving Forward • This project will be successful if: • Able to integrate with UAV systems • Able to calibrate camera in the air • Able to take a calibrated image • Reduced cost from current solution • At the conclusion of this iteration of the project the aerial imaging system should be able to have: • Passive vibration control • Onboard visible spectrum calibration • Removable storage device • Autonomous data acquisition
Sources https://edge.rit.edu/content/P09561/public/Home https://edge.rit.edu/content/R09560/public/Home http://www.cis.rit.edu/~lias/wasp/