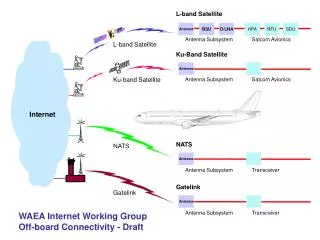
Electrical Subsystem
Electrical Subsystem. Scot Marshall Lead Manufacturing Test Engineer Constellation Project / Orion CEV Lockheed Martin Space Systems Michoud Operations Team 1913, Covington High School Covington, LA scot@LaFRC.org www. La F R C .org. 2006 IFI Hardware. 3. 6. 5. 9. 9. 4. 5. 2. 8.


Electrical Subsystem
E N D
Presentation Transcript
Electrical Subsystem Scot MarshallLead Manufacturing Test Engineer Constellation Project / Orion CEV Lockheed Martin Space Systems Michoud Operations Team 1913, Covington High School Covington, LA scot@LaFRC.org www.LaFRC.org
2006 IFI Hardware 3 6 5 9 9 4 5 2 8 1 7
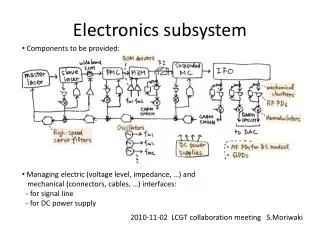
Power Distribution This Schematic is available at http://www.ifirobotics.com/rc.shtml
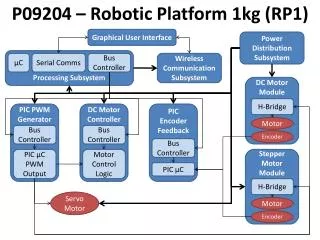
IFI Hardware • Robot Controller • Wireless RS-422 40-Channel Receiver • Back-up 7.2 VDC Battery • CM2 Camera • Operator Interface • Wireless RS-422 40-Channel Transmitter • Power Supply • Tether • Power Distribution Panel • Resettable Circuit Breaker (20A, 30A, 40A) • Robot Controller Interface • Cabling • Serial Computer Interface
1. Operator Interface • Inputs • 12 VDC Power • (4) Joystick • Competition Port • Team Number • Radio Modem • Outputs • Radio Modem • Dashboard (PC) • Tether • Special Instructions • No external power needed when Robot is tethered • Diagnostic Indictors for Robot and Operator Interface
Operator Interface Competition Tether To PC Serial Port Radio Joystick Joystick Joystick Joystick Disable Channel Robot Reset Display Select Team Number OI Reset This information is available at http://www.ifirobotics.com/docs/oi-ref-guide-11-21-2005.pdf
2. Robot Controller • Inputs • Digital Signal • Analog Signal • Radio Modem • Tether • Serial • Programming • Outputs • Relay • PWM • Radio Modem • Special Instructions • Use Breaker • Wire ON when Robot is powered • Use Backup battery also
Robot Controller Team Color PWM Outputs 7.2 VDC Backup Battery 12 VDC Battery 12 VDC Battery 16 Analog Inputs Program Black Red Wh/Yel = Ground = +5 VDC = In/Out Tether Tether 18 Digital In/Out Radio Relay Outputs Serial Input Pgm Reset This information is available at http://www.ifirobotics.com/docs/rc-ref-guide-01-31-2005.pdf
3. Breaker Panel • Inputs • 12 VDC from Battery • Outputs • Power Distribution • Ground Plane • Serial to Robot Controller • Special Instructions • Wire through Main Breaker • Terminals Numbered • G is Ground • 40 is for 40A • Wire straight into 40A (Drive Motors) • Use Spade lugs for 30A & 20A
Breaker Panel 40A and 30A Breakers Installed (6) 40A Breakers 40A wires attach under screw plate Power & Ground 30A or 20A Circuits24 places MainBattery+12 VDC Red/Green/OrangeStatus Indicator PWM Cable MainBatteryGround Terminals use spade lugs Reset Serial to Robot Controller
4. Circuit Breakers and Fuses 40A • Circuit Breakers • 20A, 30A, 40A • Push/Pull Installation • Overcurrent (thermal) cutoff • Resets as soon as condition is resolved • Fuses • 20A for Spike Relay • One-time use • Look for broken loop • Same as for Automobile 30A 20A Fuse Element
5. Wireless Modem (Transmitter) • Inputs • 9600 Baud RS-422 Data • Outputs • 902-928 MHz Band - 40 Channels • Special Instructions • 100-300 ft Range • 35 Competition Channels • Default (Practice) Channel 40 • 2 robots on Default will interfere • 01, 04, 13, 22, 31 User Settable Channels • Requires Robot Master Code Ver. 13
6. Victor 884 Speed Controller • Inputs • Digital PWM • +12 VDC, Ground • Outputs • Variable Current • Special Instructions • Use 40A Breaker • Use for CIM Drive Motor • Wire fan ON when robot is powered
Victor 884 Speed Controller Fan – GND Battery – GND Battery +12 VDCFan +12 VDC Motor – GND Motor + Power PWM Cable Wh RdBk (Fits Poorly) Red/Green/OrangeFwd/Rev/ActiveIndicator Brake/CoastJumper Cal
7. Spike Relay Fuse • Inputs • Digital PWM • +12 VDC, Ground • Outputs • Full Fwd • Full Reverse • Brake • Special Instructions • Use 20A Breaker • Use for Motor Drive Red/Green/Orange Fwd/Rev/ActiveIndicator PWM Cable
8. CMUcam2 Camera Rev. A • Inputs • PWM Power from RC • Outputs • RS-232 DB9 to Computer • RS-232 3-pin Serial to RC • Servo Control • Special Instructions • Use PWM 7.2 VDC Supply • Use for Motor Drive • Connect Only 1 RS-232 at a time
CMUcam2 Camera Rev. A Servo Outputs Deleted RS-232 to PC for GUI RS-232 to Robot for Auto PWM Cable Connector Focus by Rotating Red/GreenLED Indicators RC Board Connector On/Off RC Power This information is available at http://www.ifirobotics.com/camera.shtmlCMUcam2_fe manual
9. Cables • PWM Cable • Digital Signal • DB9 • Joysticks • Serial Communications • RS-232 • RS-422 • Tether • Digital Signal & Power
Wires • Wire Gage • Main Power – 6 AWG or larger (4 AWG) • 40A – 10 AWG • 30A – 12 AWG • 20A – 14 AWG • Color Code • Red/Blue - 12 VDC Power • Black/Yellow – Signal Return • Green - Chassis Ground • Safety • Insulate all connections
Documentation • FIRST Robotics Website • 2006 Manual – The Robot • IFIRobotics • Robot Controller • Operator Interface • Breaker Panel • RS-422 Modems • Victor 884 Motor Controller • Spike Relay • Camera
Robot Controller FRC Control System Overview(pdf) , Used for 2004 -2007 Robot ControllersInstallation Info (pdf) Size and mounting infoFRC System Quick Start, Used for 2004 -2007 Robot Controllers2005 -07 Reference Guide (pdf) 6-13-06, Used for 2005 -2007 Robot ControllerAnalog and Digital Input (pdf) 2-17-05 schematicProgram Port Pin-out (pdf) 4-7-05 schematic
Operator Interface • SpecificationsDescription2005 Reference Guide (pdf) 11-21-05Installation Info (pdf)2004 FRC System Quick Start (pdf)2004 FRC Control System Overview (pdf)Competition Port Pinout Guide (pdf) RevA 1-12-05Frequently Asked Questions (FAQ)Legacy Docs This information is available at http://www.ifirobotics.com/oi.shtml
Compressor • Inputs • Digital Signal • Outputs • Air Pressure • Special Instructions • Use Breaker • Wire ON when Robot is powered • Need Pressure Relief
Sensors • 123
Switches • 1 • 1 • 2 • 456
Chargers • 7.2 VDC • 1 • Main Battery • 456
Websites • 7.2 VDC • 1 • Main Battery • 456
Adapted from a 2004 Presentation Michael Dessingue College Mentor - Hudson Valley Community College mdessingue@nycap.rr.com Team 250 Steve Shade Controls and Simulation Engineer – Rolls-Royce steven.shade@rolls-royce.com Teams 1111 & 7 Al Skierkiewicz Broadcast Engineer - WTTW-TV Askierkiewicz@networkchicago.com Team 111
Overview • Electrical kit and IFI Hardware • Layout and Planning • Resistance and Ohm’s Law • Electrical Tools • Myth-Busting • Questions
General Layout Tips • Label and/or Color Code Everything • Secure wire so a hit from another robot doesn't stretch the wiring to a breaking point or pull a terminal out of a breaker, victor or spike • When in doubt, insulate • Secure the battery so it doesn't fall out • Leave some slack in wire to allow for swapping of parts • Be careful when running wiring through frame members so that mech heads don't drill into it at some point down the road
FIRST Electrical Problem How much voltage is lost in a typical FIRST circuit?
Ohm’s Law By Ohm’s Law: V = I * R 12 V = I * 24 W I = 0.5 A + _ 12 VBattery 24 W
Typical FIRST Circuit 120 A Circuit Breaker Victor 884 Speed Controller + _ 40 A Circuit Breaker VoutMeasured 12 VBattery Assuming the Victor 884 Speed Controller is given an input signal of 254 from the Robot Controller, how much voltage is output to the device?
Typical FIRST Circuit 120 A Circuit Breaker Victor 884 Speed Controller + _ 40 A Circuit Breaker VoutMeasured 12 VBattery Circuit consists of 8’ of #6, 4’ of #10, and 2’ of #10. 14 Connections in the circuit
More Wire Adds More Resistance • “Standard Wire Foot” - A 10 gauge wire will drop about 0.1 volt per foot at the stall current of any of the drive motors. • There is resistance in every wire • .001 ohm/ft #10 wire • .0004 ohm/ft #6 wire
Typical FIRST Circuit Resistances: 8’ #6 = 0.0032 W 6’ #10 = 0.0060 WRtotal = 0.0092 W Steady State Current: 40 A Voltage Drop = I*R = 40 A * 0.0092 W = 0.368 V Max Voltage at Device = 12V - 0.368V = 11.632 V
Typical FIRST Circuit Resistances: 8’ #6 = 0.0032 W 6’ #10 = 0.0060 WRtotal = 0.0092 W CIM Motor Stall Current: 114 A Voltage Drop = I*R = 114 A * 0.0092 W = 1.05 V Max Voltage at Device = 12V - 1.05V = 10.95 V At Stall Current of CIM, Max Voltage at the CIM motor for the same current path is 10.95V!
Reducing Resistance • Check every crimp to make sure the wires do not move or turn when pulled • Use the correct tool for the job • Solder all critical joints • Shorten the length of your wires (also helps in keeping things neat and traceable)
Crimp Connections • Buy a good crimper for about $20 • Home Depot, Lowes Electrical Sections • Many Auto Parts Stores also stock crimpers • Look for crimper with good handles and can used with wire gauges 10 to 24
Soldering • Good Practice to solder all connections where high currents exist • Use Appropriate Size iron for the job • Use a Rosin Core Solder for all electronics
Other Required Tools • Multimeter (DMM) • Voltage • Resistance • Continuity • Wire Strippers • Re-strip any wires where copper strands are lost
The RC, OI, Victors and Spikes need external components to run (i.e. capacitors, voltage regulators, etc.) IFI has done a good job of designing the power and internal circuitry of all the kit electronic components. There is no additional circuitry required for reliable operation. The fan that is mounted on the speed controller is required though and most teams will wire this fan to the controller power input. The fan then becomes an indication of good input power to the controller.
The controllers can’t go from forward to reverse quickly. The speed controllers do exactly what you tell them to do. Your robot cannot make the sudden changes you are demanding for other reasons related to mechanical design and physics. You cannot hope that the control system will overcome all other losses. It does not have the power resources to overcome the momentum of a charging 130 lb. robot and change it’s direction.
The controllers and motors are not matched, the switching is all wrong. This may seem to be the case, but the components work very well together. All teams use the same motors and drive components so there is no disadvantage to any team using the supplied parts.