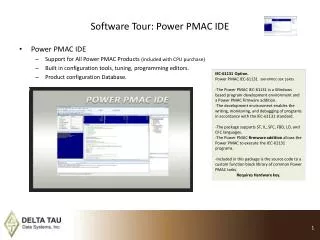
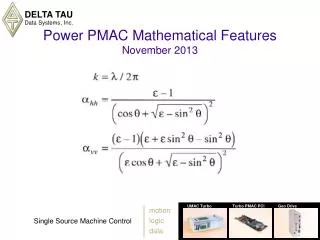
Power PMAC Tuning Tool Overview
Power PMAC Tuning Tool Overview. Power PMAC Servo Structure. Versatile, Allows complex servo algorithms be implemented Allows 2 degree of freedom control designs be implemented. Tuning Software Overview. Shows active motors. Shows motor commutation status


Power PMAC Tuning Tool Overview
E N D
Presentation Transcript
Power PMAC Servo Structure • Versatile, • Allows complex servo algorithms be implemented • Allows 2 degree of freedom control designs be implemented.
Tuning Software Overview Shows active motors Shows motor commutation status (i.e. N/A Not commutated by P-Pmac Else Phased/ not phased) Shows motor status highlighted when an error occurs Shows active filters Shows motor type Shows Control Alg. Basis PID, user-written etc
Current Loop Auto-tuning • Sets up the current loop feedback (PI) gains • Estimates motor electromechanical properties • Calculates the required feedback gains to achieve the desired performance
Current Loop Interactive Tuning • Lets user to tune (fine-tune) the digital current loop interactively
Open Loop Test • Used for verification of open loop operation of the motor. Useful for time domain identification
Position Loop Auto-tuning • Automatically selects position loop feedback gains according to the desired value of natural frequency and damping ratio.
Position Loop Interactive Tuning • Interactive setting and fine tuning the position loop gains. • Standard test inputs for performance verification
Position Loop Filter Calculator/Setup • Calculates and sets filter coefficients • Enables user to use single, double, and low pass filter of various orders. • Enables implementation of velocity loop filter independent of the position loop.
Trajectory Pre-filter Setup • Used for (in general) to remove the adverse effects of low frequency resonances via removing this low frequency content from the reference command. • Allows implementation of single, double notch filters, 1st or 2nd order low pass filters etc. at sampling frequencies lower than that of the servo sampling frequency by a user defined factor.
New Features • Gantry Cross-Coupled Control • Simplified Auto-tune/Current Loop Auto-tune • Adaptive Control • Interactive Filter Setup • More features in tune plots, smoothing data, viewing acc.vel. , servo command, f.e., etc
Gantry Cross-Coupled Control Gantry X-Coupled Control Block Diagram
Gantry Cross-Coupled Control Enables (kills) both motors shows info. about gantry motors Calculates cross-coupled control gains if checked Does auto-tune move for both motors simultaneously
Gantry Cross-Coupled Control (cont.) • Similarly, in interactive tuning user can (later) implement and or change cross-couple gantry gains
Adaptive Control Adaptive Servo Control Block Diagram Assumes a rigid body model with time varying inertia Online estimation of inertia changes i.e. plant gain Automatic compensation of servo loop gains for consistent closed loop bandwidth
Adaptive Control Setup Parameters Nominal (Reference) Gain Estimation occurs if servo output is greater than this value (Ensures the richness of the excitation) Sets estimation window size Sets upper and lower bound for estimated plant gain to ensure stability of the closed loop system
Interactive Filter Setup • Allows changing the frequencies of the filter frequencies on the fly • Updates filter frequencies in btw. repetitive moves