Download
1 / 23
300 likes | 759 Vues
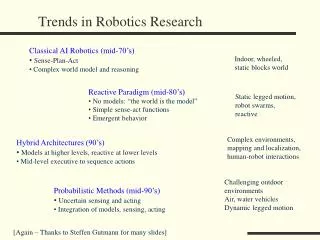
Trends in Robotics Research. Classical AI Robotics (mid-70’s) Sense-Plan-Act Complex world model and reasoning. Indoor, wheeled, static blocks world. Reactive Paradigm (mid-80’s) No models: “the world is the model” Simple sense-act functions Emergent behavior. Static legged motion,

E N D
Trends in Robotics Research • Classical AI Robotics (mid-70’s) • Sense-Plan-Act • Complex world model and reasoning Indoor, wheeled, static blocks world • Reactive Paradigm (mid-80’s) • No models: “the world is the model” • Simple sense-act functions • Emergent behavior Static legged motion, robot swarms, reactive Complex environments, mapping and localization, human-robot interactions • Hybrid Architectures (90’s) • Models at higher levels, reactive at lower levels • Mid-level executive to sequence actions Challenging outdoor environments Air, water vehicles Dynamic legged motion • Probabilistic Methods (mid-90’s) • Uncertain sensing and acting • Integration of models, sensing, acting [Again – Thanks to Steffen Gutmann for many slides]
Classic AI Robotics • Shakey (1967) at SRI – Rosen, Nilsson, Hart • First AI Robot • Foundational study: reason about the world, e.g., “block a doorway” • How do you represent the environment? • How do you plan to change the environment? • Set of predicates describing the world AT(Box1, (32, 11))ON(Box2, Box1) • Rules among the predicates (predicate logic) • Operators describing how actions affect the world => STRIPS planner CS225B Kurt Konolige
Sense-Plan-Act Paradigm • Architecture: Sense Plan Act STRIPS Exec ILUs DB • Exec was in charge • ILUs were reactive • Opportunistic use of plans • Replanning CS225B Kurt Konolige
Shakey’69 Stanford ResearchInstitute CS225B Kurt Konolige
Stanford CART ‘73 Stanford AI Laboratory / CMU (Moravec) CS225B Kurt Konolige
Classical Paradigm -Stanford Cart • Take nine images of the environment, identify interesting points in one image, and use other images to obtain depth estimates • Integrate information into global world model • Correlate images with previous image set to estimate robot motion • On basis of desired motion, estimated motion, and current estimate of environment, determine direction in which to move • Execute the motion CS225B Kurt Konolige
Classical Paradigm as Horizontal/Functional Decomposition CS225B Kurt Konolige
Classical Paradigm as Horizontal/Functional Decomposition CS225B Kurt Konolige
Act Act Act Act Sense Sense Sense Sense Behavioral Paradigm • Reaction to perceived inadequacies of the SPA paradigm • Brooks, Arkin, Payton • Radical change: use a short Sense-Act Cycle • Many different incarnations • Subsumption (Brooks, Connell, …) • Potential Fields, Motor Schemas (Arkin, Gat) • Rule-based (Saffiotti, Ruspini, Konolige) • Circuits (Gat, Rosenschein and Kaelbling-Pack) • Biological Inspiration • No complex data structures • No complex sensory processing • Vertical vs. Horizontal Decomposition CS225B Kurt Konolige
Reactive Paradigm as Vertical Decomposition CS225B Kurt Konolige
Act Act Act Act Sense Sense Sense Sense Behavioral Paradigm: Tenets Swarm robots: • Robots are situated • No abstract thinking • Interpretation of robot state depends on environment • Behavior-based programming, emergent behaviors • No hierarchical controller • Distributed, concurrent behaviors • Behavior-specific sensing • Quick and dirty (e.g., seagull chicks) Genghis: • How do behaviors combine? CS225B Kurt Konolige
Motor Schema Direct mapping from the environment to a control signal obstacle-avoiding behavior goal-seeking behavior CS225B Kurt Konolige
Motor Schema path taken by a robot controlled by the resulting field vector sum of the avoid and goal motor schemas CS225B Kurt Konolige
Behavior Design • Behavior design is more an art than a science • In what situation does the behavior apply? • What is the result of the behavior? • Easy to program? • Robustness? • Scalability? • Good behaviors produce smoothly varying control signals • Control signals that oscillate or otherwise jump around lead to poor control performance • Emergent behavior is difficult to predict CS225B Kurt Konolige
Project 1: Wall Following • Find a wall to travel along • Use right-hand rule: keep wall on the right • Keep a short distance from the wall, going parallel to it • NOTE: *must* interpret LRF readings by finding “wall” features • Follow along inside and outside bends • Go through reasonable openings (> 1m) • Suggestions: • Use behaviors for different situations: along wall, far from wall, at inside corner, etc. • Debug them separately • Invoke behaviors based on the situation • Use heading control rather than separate wheel velocities CS225B Kurt Konolige
Multi-robot coordination Hybrid Architectures More Capable Faster Planner SSS Connell Motor Schemas Arkin RAPS Firby Saphira Konolige et al Sequencer Behaviors Complex Control Architectures • Task: there are three robots to deliver six packages to four people. • Question: how much force should Robot 1 apply to its left wheel? • state -> a1, a2 ... an CS225B Kurt Konolige
Final Project (Fall 2001) CS225B Kurt Konolige
QRIO’s Navigation Architecture • Each module runs in own thread • Message passingbetween modules • Aperios/OPEN-Rreal-time system CS225B Kurt Konolige
Environment Classification 6 different types: • Floor • Stairs • Border • Tunnel • Obstacle • Unknown CS225B Kurt Konolige
Configuration and Modularity Only enabled actions are allowed when expanding a node during path search Motion behavior is selected based on the types of cells on the path and on the path direction as reported by the path planner. CS225B Kurt Konolige
Experiments narrow obstacles Stairs (2 x 3cm) Table (35 cm) QRIO autonomously navigates on an obstacle course (IJCAI-2005)
PR2 Door and Plugin (Milestone 2) Milestone 2: Doors and Plugin CS225B Kurt Konolige