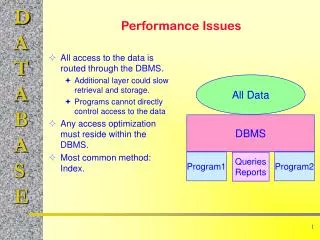
Performance Issues in Non-Gaussian Filtering Problems
This study investigates performance issues in non-Gaussian filtering methods, particularly in the context of linear systems with non-Gaussian process noise and Gaussian measurement noise. We compare various filters, including the Extended Kalman Filter (EKF), Multiple Model Filter (MMF), Particle Filter (PF), and Point Mass Filter (PMF). Our evaluation employs Mean Square Error (MSE) and Kullback divergence to assess filtering effectiveness. Results indicate that while MSE may overlook critical information, Kullback divergence offers a nuanced understanding of distribution differences, particularly in non-Gaussian scenarios.

Performance Issues in Non-Gaussian Filtering Problems
E N D
Presentation Transcript
Performance Issues in Non-Gaussian Filtering Problems G. Hendeby, LiU, Sweden R. Karlsson, LiU, Sweden F. Gustafsson, LiU, Sweden N. Gordon, DSTO, Australia
Motivating Problem – Example I • Linear system: • non-Gaussian process noise • Gaussian measurement noise • Posterior distribution:distinctly non-Gaussian
Motivating Problem – Example II • Estimate target position based on two range measurements • Nonlinear measurements but Gaussian noise • Posterior distribution: bimodal
Filters The following filters have been evaluated and compared • Local approximation: • Extended Kalman Filter (EKF) • Multiple Model Filter (MMF) • Global approximation: • Particle Filter (PF) • Point Mass Filter (PMF, representing truth)
Filters: EKF EKF: Linearize the model around the best estimate and apply the Kalman filter (KF) to the resulting system.
Filter 1 Filter 1 Filter 1 Filter 1 Mix Filter 2 Filter 2 Filter M Filter M Filters: MMF • Run several EKF in parallel, and combine the results based on measurements and switching probabilities
Filters: PF Simulate several possible states and compare to the measurements obtained.
Filters: PMF • Grid the state space and propagate the probabilities according to the Bayesian relations
Filter Evaluation (1/2) Mean square error (MSE) • Standard performance measure • Approximates the estimate covariance • Bounded by the Cramér-Rao Lower Bound (CRLB) • Ignores higher-order moments!
Filter Evaluation (2/2) Kullback divergence • Compares the distance between two distributions • Captures all moments of the distributions
Filter Evaluation (2/2) Kullback divergence – Gaussian example • Let • The result depends on the normalized difference in mean and the relative difference in variance
Example I • Linear system: • non-Gaussian process noise • Gaussian measurement noise • Posterior distribution:distinctly non-Gaussian
Simulation results – Example I • MSE similar for both KF and PF! • KL is better for PF, which is accounted for by multimodal target distribution which is closer to the truth
Example II • Estimate target position based on two range measurements • Nonlinear measurements but Gaussian noise • Posterior distribution: bimodal
Simulation results – Example II (1/2) • MSE differs only slightly for EKF and PF • KD differs more, again since PF handles the non-Gaussian posterior distribution better
Simulation results – Example II (2/2) • Using the estimated position to determine the likelihood to be in the indicated region • The EKF based estimate differs substantially from the truth
Conclusions • MSE and Kullback divergence evaluated as performance measures • Important information is missed by the MSE, as shown in two examples • The Kullback divergence can be used as a complement to traditional MSE evaluation
Thanksforlistening Questions?