Download
1 / 13
140 likes | 537 Vues
Parknet : Drive-by Sensing of Road-Side Parking Statistics. Presented by: Richard Wood. Overview. Goals and strategies Methods Performance evaluation Performance improvements Remaining Challenges. Problem and Solutions. Observation Downtown traffic from parking delays

E N D
Parknet: Drive-by Sensing of Road-Side Parking Statistics Presented by: Richard Wood
Overview • Goals and strategies • Methods • Performance evaluation • Performance improvements • Remaining Challenges
Problem and Solutions • Observation • Downtown traffic from parking delays • Cheap street parking vs. expensive parking garages • Solution • Detailed information of parking availability • Current Solution • Fixed sensor networks. • Proposed solution • Drive-by monitoring • Piggyback off of pre-existing infrastructure
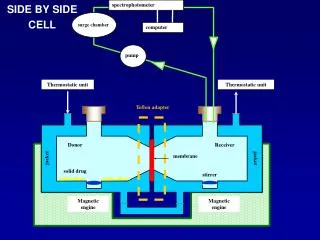
Park Net • The Vehicles • Ultrasonic sensors – mounted on passenger door to detect vacant space through distance measurement • GPS – localize vacant space • Ultrasonic sensors • Cheap. Potential reuse of sensors already existing on cars -- automated parking. • Central Server • Build real-time map of parking availability • Clients query the server to find parking
Park Net • Detection – slotted versus unslotted • Space Count • Occupancy Map – localization correction
Devices and Challenges Challenges: • Ultrasonic sensor: beam-width increases with distance. Erroneous echoes from objects at angles. • GPS errors
Detection Algorithm - Slotted • Sensor trace (width and depth) measured against a threshold to determine if a “dip” is a parked car. • Threshold established from training data • 2.52 meters width • 89.7 inches • Error rate: 12.4%
Detection Algorithm - Unslotted • Slotted algorithm – N parking spaces filled • Unslotted algorithm – D space between cars • Potential parking spaces – based on threshold • Difficult: variable space between cars • Need to be more precise with imprecise sensors
Detection Algorithm - Evaluation • Evaluation: Webcam • Time stamped – actual presence of car compared to data from sensors • Missed detections and false positives • Tradeoff: Detection vs accuracy Slotted Unslotted
Occupancy Map • Parking spaces need to be mapped to reference map • Accurate localization needed • GPS error rates ~5-10 meters • Increase accuracy through error correlation
GPS Error Correlation and Environment Fingerprinting • Observation: GPS error is correlated over short distance • Tag stationary objects with a GPS, errors are large • Correct the errors by knowing the location of the fixed objects and taking offset of the mean GPS location of the object • Correlate locations between objects • Limited window of correction
Remaining Challenges… • Multilane roads – sensors will detect other cars rather than or objects other than parking spaces. • Speed limit – ultrasonic sensor limits the speed of the car due to sampling at the speed of sound. • False data – Reflections of the sound waves may come from an angle making the data not representative of whether a car is at a certain location perpendicular to the cars path.