Designing an Interception Algorithm for Ballistic Missiles: A Comprehensive Approach
This project focuses on developing an advanced algorithm for intercepting ballistic missiles using a ballistic interceptor model. The aim is to find an optimal interception plan that satisfies constraints related to launch timing, maximum interceptor height, required velocity at interception, and proximity of interception. The approach includes modeling ballistic missile trajectories, evaluating feasible interception plans, and selecting an optimal plan based on user-defined parameters. Key techniques such as the Runge-Kutta method, linear interpolation, and artificial neural networks are utilized in achieving accurate predictions and solutions.

Designing an Interception Algorithm for Ballistic Missiles: A Comprehensive Approach
E N D
Presentation Transcript
Interception Planning System Omer Cohen ShiloAbramovicz With the guidance of: EliranAbutbuland Sharon Rabinovich
Project Definition Designing an algorithm for intercepting ballistic missiles with a ballistic interceptor, based on target and interceptor model.
Problem Definition Finding an interception plan (a launch yaw and pitch) Which satisfies the following constraints: 1.The launch does not occur in the past 2.The maximum height of the interceptor doesn’t cross a certain height. 3. The interceptor’s velocity at the interception point must be larger then the user’s demand. 4. The aspect of the interception must be close enough to .
Problem Definition From the feasible solutions we choose the one that maximize the following objective function: (w1, w2, w3)- user’s input. w1*IcpVel+w2*RelativeVel+w3*IcpAccel
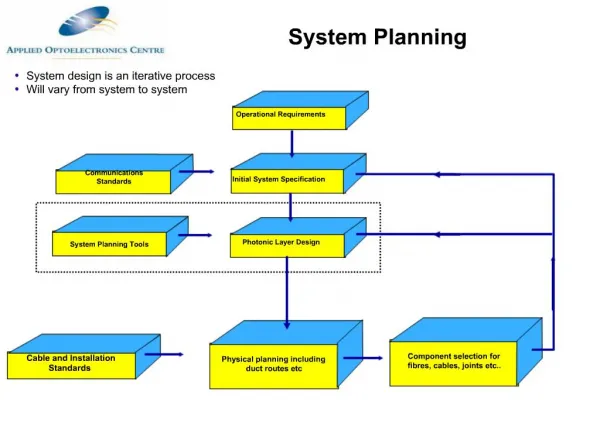
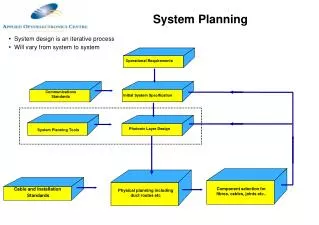
Development Steps • Building a model of ballistic missile trajectory. • Finding all the feasible interception plans under • the given constraints • Choosing the optimal plan according the objective • function.
Model Design- Forces - Drag Force A force that oppose the relative motion of an object through a fluid (a liquid or gas). -Velocity Vector -Drag Coeff -Cross-sectional area -Material Density -Gravitation
Motion Equations Ballistic Coefficient
Atmosisa Function [T a P rho]=atmosisa(height) The function gets the height above sea level And returns: -Temparture -Pressure -Air Density -Speed of sound
Atmosisa Function Uses the International Standard Atmosphere model This function uses another function, “atmosplase”, with constants, such as: and are calculated using the Ideal Gas Model.
Calculating β(ballistic coeff) We calculate βusing a linear interpolation
Euler’s Approximation Method A second order approximation method, used here to solve the motion equations. For a certain and the initial conditions :
RK4 - Approximation Method A second order approximation method, used here to solve the motion equations. For a certain and the initial conditions :
RK4 - Approximation Method Using this method for propagating the location requires the calculation of the velocity at half the time, such as: Which complex the calculation difficulty. Therefore, we used the following approximation :
Possible Solutions We gathered all the possible trajectories with:
Possible Solutions Each point in the space can be achieved with two different launch pitches Suggestions: • Using two tables- one for the lower impact angle and • the other for the larger. • fit every relevant paremeter (pitch angle, impact angle, • impact velocity, etc.) to a fifth degree polynomial. • fitting using ANN.
Refernces • Wikipedia- Runge-Kutte Method. • The International Standard Atmosphere