Enhancing Intersection Safety for Older Drivers: Human Factors Approach
This project focuses on improving intersection safety for older drivers through human factors analysis. Case studies from Virginia, Maine, and Georgia are examined to propose innovative collision countermeasure systems and warning signs. Data on speed, time to collision, and driver behavior are evaluated to develop effective interfaces for enhancing intersection safety. The research addresses gap acceptance problems, information needs, and task analyses specific to older drivers, crucial for reducing crash risks at intersections.

Enhancing Intersection Safety for Older Drivers: Human Factors Approach
E N D
Presentation Transcript
Human Factors ProgressIDS Project Nicholas Ward Jason Laberge Mick Rakauskas HumanFIRST Program
Unsignalized Intersections:Previous work on DII’s • Collision Countermeasure System • Prince William Co., Virginia • Intersection Collision Avoidance Warning System • Norridgewock, Maine • Limited Sight Distance Warning Signs • Gwinnett County, Georgia
Collision Countermeasure System Prince William Co., Virginia • Thru-STOP at two 2-lane roads • Focus on warning major approach • Data Collected: • Speed (intersection arrival, reduction) • Projected time to collision (PTC)
Human machine interface evaluated forCollision Countermeasure System (CCS)Prince William County, Virginia • Aden road (major) & Fleetwood Drive (minor) intersection located on plateau with restricted sight distances. • Drivers on minor leg often had difficulty sensing safe gap On minor leg On major leg
Collision Countermeasure System (minor approach) (major approach)
Intersection Collision Avoidance Warning System Norridgewock, Maine • Thru-STOP at two 2-lane roads • Focus on warning minor approach • Data: • Observational techniques • Surveys
Limited Sight Distance Warning Signs Gwinnett County, Georgia • 18 Thru-STOPs at two 2-lane roads • Chosen based on minimum sight distance guidelines & reported problems • Warnings for major &/or minor approaches • Signs considered interim solution
Human Factors Tasks • Analyze problem • Task analysis • “What are drivers doing wrong?” • “Who is at most risk?” • Driver model (Information Process) • “Why are they doing it wrong?” • “What information could support correct behavior?” • Previous solutions • “What has not worked before?” • Simulate case site • Propose interfaces and simulate candidate • Evaluate candidate interface
Task Analysis • Detect intersection • Decelerate and enter correct lane • Signal if intending to turn • Detect and interpret traffic control device • Detect traffic and pedestrians • Detect, perceive, and monitor gaps • Accept gap and complete maneuver • Continue to monitor intersection
Human factors issues • In Minnesota, most drivers stop before proceeding (Preston & Storm, 2003) • 57% stopped in 2296 rural thru-STOP accidents • 87% of right angle crashes at US 52 and CSAH 9 occurred after the driver stopped • NOT a violation problem • Instead, a gap acceptance problem • Detecting vehicles and presence of gaps in traffic • Perceiving gap size • Judging safe gaps
Information Needs • Vehicle Detection • Convey speed/distance/arrival time of lead vehicle • Convey lead gap size • Judge “safe gap” (and display location in traffic)
Information Needs • Most prior systems limited to emphasizing: • Presence of intersection and traffic control device. • Presence of approaching cars. • Approach speed of cars. • Given that awareness of intersection and compliance with TCD’s is not the problem in our case, method 1 above will not benefit safety. • To the extent that drivers are at risk because of problems with more complex information needs (C and D), simply presenting information about vehicle detection will not benefit safety.
Information Needs • Vehicle Detection • Convey speed/distance/arrival time of lead vehicle • Convey lead gap size • Judge “safe gap” (and display location in traffic) • Since the research does not give evidence of the relative importance of these factors toward crash risk, it is necessary to design options for ALL of the above. • Note also, that the highest level (D) also satisfies the lowest level (A), but NOT conversely.
Target Population • Older drivers (> 65 years) have a high crash risk at intersections • Drivers > 75 years had greatest accident involvement ratio (Stamatiadis et al., 1991) • Drivers > 65 years - 3 to 7 times more likely to be in a fatal intersection crash (Preusser et al., 1998) • Drivers > 65 years - over-represented in crashes at many rural intersections in Minnesota (Preston et al., 2003)
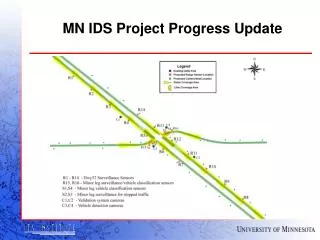
3,784 Thru-STOP Isxns in MN Hwy Systemwere evaluated • Total> CR (% of total) • 2-Lane - 3,388 | 104 (~ 3%) • Expressway - 396 | 23 (~ 6%) Intersection Selection: Based on State-wide Crash Analysis • Analysis of present conditions and intersections …. Howard Preston, lead • Identification of Experimental Site: Minnesota Crash Data Analysis
Candidate Intersections: At-Fault Driver Age Source: Mn/DOT 2000 – 2002 Crash Data
Candidate Intersections:Crash Type Distribution Source: Mn/DOT 2000 – 2002 Crash Data
Sight distance restricted on the W approach at CSAH 9 Elevation Note differences in N and S vertical alignments
Interface Task • Human factors analysis of crash problem • Task Analysis • Driver Model • Abstraction Hierarchy • Expert panel review of concepts • Everyone had own perspective • No consensus • Candidate set proposed based on information needs: • Detect vehicle • Present speed and time • Present gap size • Specify safe gap • Sign formats consistent with MUTCD (shape, color)
Four Prototypes • Hazard Beacon • Flashing red beacon • activates when • intersection is unsafe • System tracks • speeding or arrival • time of lead vehicle • Static Warning • New warning sign • Sign conforms to • human factors • criteria for warning • labels • Low cost solution • (baseline) • Split-Hybrid • Arrival time • countdown for • lead vehicle • Prohibitive • symbol relative to • maneuvers based on • near and far-side • traffic conditions. • Speedometer • Speed monitor • for lead vehicle • Flashes red when • near or far-side • vehicle is speeding
Expert Review • 19 evaluations sent out (37 % response rate) • 2 Minnesota IDS team • 5 Expert panel • No consensus
Static Warning Sign STOP STOP DIVIDED HIGHWAY CAUTION FAST CROSSING TRAFFIC BE CAREFUL STOP <---- ----> CAU FAS
Hazard Beacon The light above the sign is solid white at all other times to indicate the system is functional Dangerous Crossing Flashing Red STOP STOP STOP DIVIDED HIGHWAY DANGEROUS CROSSING WHEN FLASHING RED A light above the STOP sign flashes red if any “lead” vehicle is speeding and/or if an unsafe gap is detected in either direction <---- ----> CAU FAS
Split-Hybrid STOP VEHICLE WILL ARRIVE FROM THE LEFT IN SECONDS VEHICLE WILL ARRIVE FROM THE RIGHT IN SECONDS VEHIC WILL ARR FROM LEFT IN SECONDS STOP VEHIC WILL ARRI FROM LEFT IN SECONDS 14 This display must be angled to be seen by the stopped driver
Split-Hybrid Both the left and right displays will show the same symbols. When a vehicle is within the arrival time that defines the safe gap limit, the background changes to red and the arrival time flashes STOP VEHICLE WILL ARRIVE FROM THE LEFT IN SECONDS VEHICLE WILL ARRIVE FROM THE RIGHT IN SECONDS VEHIC WILL ARR FROM LEFT IN SECONDS STOP VEHIC WILL ARRI FROM LEFT IN SECONDS 14 3 This display must be angled to be seen by the stopped driver
Split-Hybrid STOP VEHICLE WILL ARRIVE FROM THE LEFT IN SECONDS VEHICLE WILL ARRIVE FROM THE RIGHT IN SECONDS VEHIC WILL ARR FROM LEFT IN SECONDS STOP VEHIC WILL ARRI FROM LEFT IN SECONDS 3 6 This display must be angled to be seen by the stopped driver
Speedometer Speed changes white and flashes; background changes red when major road vehicle approaches at greater (> 10mph) than posted speed STOP FAST VEHICLES APPROACHING FROM LEFT MPH FROM RIGHT MPH STOP 55 85
Classification of concepts • How each concept automates or supports the information processing stages of drivers at thru-STOP intersections (from Parasuraman, Sheridan, and Wickens; 2000). • Information acquisition: Extent to which each concept helps with sensing and detecting info (i.e., vehicles, hazards) • Low = applying limited or no sensors to scan and observe different parts of the road • High = filtering and highlighting specific information content from sensors • Information analysis: Extent to which information is processed and inferences made • Low = predict changes in information over time • High = integrate information and potentially extract a single value • Decision making: Process by which decision alternatives are evaluated and selected • Low = present a driver with the full set of alternatives • High = make the decision for the driver and act autonomously • Action execution: Process by which a specific action is completed • Low = automating a simple task such as turning on the vehicle headlights • High = taking full control of a car
Evaluation • Simulation required • Interfaces do not exist in real world • Need flexibility to modify interfaces • Need control over traffic (and environment) conditions • Need repeated exposure to same conditions to produce reliable data • Simulation limits • Calibration with real world data from on site instrumentation • Limitations to “size” of experiment • Time intensive to implement and validate
Practical limits to size of experiment • Keep subjects 2 to 3 hours; < 2 hrs of driving in 30 min sessions. • Issues: • 5 interface conditions (baseline, static warning, hazard beacon, hybrid, and speedometer). All subjects will see all condition worlds. • In each world, mainline traffic conditions will be scripted to represent specific gap sequences – need to determine wait time and the presence of different (safe) gap sizes in the traffic stream. • Will test long and short wait times. • To collect reliable data (e.g., gap size accepted, clearance time, safety margin with respect to remaining gap during merge), each condition world must be experienced at least twice…Implies that each condition world must have at least 2 variants in terms of traffic conditions. • Each replicated world will need different traffic conditions to limit effects of learning and expectancy on driver decisions. • If allow 10 minutes for each drive, then we have approx 1 and 2/3 hrs of driving per subject. May be too much for individual drivers (notably older drivers). Piloting will be used to evaluate study design.
Conclusion Task Completed: Intersection selected and simulated with high Geospecific accuracy. • Task On schedule: • Interface concepts generated based on human factors analysis and preliminary review by experts. • Interface candidates simulated in driving simulator environment. • Demo scheduled for project panel.