Kinesiology 406
Kinesiology 406. Motor control, motor learning and skilled performance. Class information. Professor , Dr. John Buchanan Web page: http://bucksplace.tamu.edu Syllabus handouts by section Articles etc. Book: Motor Learning and Control (concepts and applications) By Richard A. Magill

Kinesiology 406
E N D
Presentation Transcript
Kinesiology 406 Motor control, motor learning and skilled performance
Class information • Professor, Dr. John Buchanan • Web page: http://bucksplace.tamu.edu • Syllabus • handouts by section • Articles • etc. • Book: Motor Learning and Control (concepts and applications) • By Richard A. Magill • Class rules • Cell phones must be out of sight • All laptops, notepads, etc. must be closed and out of sight
Grades • Exams and quizzes • 2 major exams, 100 points each: 200 points (45%) • 9 in class assignments: points each: 180 points (30%) • Course grade of A: 342 points • Course grade of B: 304 to 341.9 points • Course grade of C: 266 to 303.9 points • Course grade of D: 228.0 to 265.9 points • Course grade of F: < 228 points
What is this course about?Motor control • As a scientific discipline, the area of motor controlseeks to identify the , ,and processes involved in the activation of our muscles and coordination of our limbs when performing a motor skill. • Brain • Body
What is this course about?Motor learning • As a scientific discipline, the area of motor learningseeks to identify how practice produces changes in the , ,and processes involved in the activation of our muscles and coordination of our limbs when performing a motor skill. • Brain • Body
What is controlled?Degrees of freedom problem: outflow • What can a muscle do? • How many muscles in the human body? • How many possible muscle activity patterns are there? • How many nerve cells in the brain?
What is learned?Sensory input-Perceptual information: inflow • Where does knowledge about moving originate? • How do we move in the world around us? • How do we remember how to move? • Why is paying attention important for learning?
How is the motor control-learning problem approached? • Physical mechanisms • Abstract processes • Theoretical
Motor skills: similarities and differences • Is this a true statement? Soccer Piano Drumming
Motor learning: similarities and differences • Is this statement true or false: coaching
Chapter 1 The Classification of Motor Skills Pages 2-11 only. Do not read section: “Gentile’s two-dimensions taxonomy”
Levels of analysis and classifications Motor skill (or action) Movements Classification of motor skills
Muscles and motor skills • Muscle size
Movements and motor skills Limb and body motion
Environmental factors and motor skills Action initiation and context stability
Chapter 2 The Measurement of Human Performance All pages, 22-45.
Experimental participants Populations Samples Selecting a sample
Experimental variables and groups Independent variable Dependent variable Control condition Experimental condition
Dependent variables: performance outcome (goal-directed) measures Temporal measures Spatial measures
Dependent variables: performance production (movement-directed) measures Kinematics – single joint or limb Kinematics – two or more joints Electromyography (EMG) Brain activity signals (EEG, PET, fMRI)
Data collection procedures and equipment Computers
Data collection procedures and equipment • Motion analysis systems
Viewing kinematic data • Stick figure representation of movements and actions
Plotting kinematic data: time series and angle-angle plot Add right-arm abd add left-armabd Left-arm motion (x) abduction 15 cm adduction Right-arm motion (x) Relative phasing
Joystick-target taskDisplacement and velocity 30 cm Vel (cm/s) 0 0 1 .75 .5 Time (sec) Speed. = Dis./ time Vel. = (Di+1 – Di)/ time
Displacement and EMG How is muscle activity related to limb movement?
Analyzing performance and outcome measures: mean = (x)/n Arithmetic mean: bimanual circle tracing task Left-arm abd-add 14 14 15 16 15 16 14 16 Right-arm abd-add 12 13 17 17 19 21 9 16 (x)/n = = (x)/n = =
Computing errors for outcome and performance measures The task has a specific goal and the participant receives a score.
Constant error (CE): directional bias Goal: bimanual circle tracing task (amplitude of 15 cm) Left-arm Deg.Error 1) 16 2) 12 3) 14 4) 15 5) 15 6) 13 7) 17 8) 15 Right-arm Deg.Error 1) 16 2) 12 3) 18 4) 14 5) 13 6) 19 7) 10 8) 13 CE= CE= Mean CE = Mean CE =
Absolute error (AE): accuracy Goal: bimanual circle tracing task (amplitude of 15 cm) Left-arm Deg.Error 1) 16 2) 12 3) 14 4) 15 5) 15 6) 13 7) 17 8) 15 Right-arm Deg.Error 1) 16 2) 12 3) 18 4) 14 5) 13 6) 19 7) 10 8) 13 AE= AE= Mean AE = Mean AE =
Variable error (VE): consistency Goal: bimanual circle tracing task (amplitude of 15 cm) Right-arm data MnAEscore (Mn-sc)(Mn-sc)2(Summed)/nsqrt 1 3 3 1 2 4 5 2 (2.625-1) = (2.625-3) = (2.625-3) = (2.625-1) = (2.625-2) = (2.625-4) = (2.625-5) = (2.625-2) = 13.87/8 = 1.73 VE = =
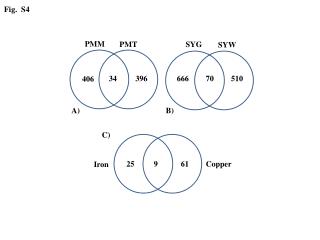
Root mean square error (Spatial target) 10 targets 1) 9 2) 20 3) 9 4) 18 5) 8 6) 16 7) 7 8) 14 9) 6.5 10) 6 10 scores 1) 9.1 2) 22 3) 4 4) 20 5 18 6.5 19 5.5 5 RMSE 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) S2 T2 T1 T3 S1 S3
Brain recordings and imaging EEG (Electroencephalography) fMRI (functional Magnetic Resonance Imaging) PET (Positron Emission Topography)
Positron emission tomography:PET scan - rCBF top - nose Figure 2C • radioactive tracer – sugar Kandel, Schwartz, Jessel (1991). Principles of Neuroscience, Figure 22-5, pp .315
PET scan and visual stimuli Eyes closed Kandel, Schwartz, Jesse (1991). Principles of Neuroscience, Figure 22-6, pp .316
Chapter 4 Neuromotor Basis of Motor Control All pages, 64-79.
Types and Functions of NeuronsInformation flow Three types of functional neurons • Where does an action start and where does it end?
Cerebral hemispheres Left right
Somatotopic maps: commands to muscles and body sensation to cortex Penfield and Rasmussen (1950)
Electroencephalography (EEG): movement preparation Evoked potentials Readiness potential Surface measure
Motor cortex to muscles Crossing over of control signals • Connectivity and surface area for the hands Left-H. Right-H.
Subcortical structures Basal ganglia – 4 components Thalamus
Brain stem and cerebellum Receives input from Regulates Involved in spinal cord
Cerebellum and timing Ivry et al., (2002). Spencer et al., (2003). Discrete tapping task - finger flexion Continuous motion – circle drawing Why is this difference important?
Continuous and discrete actions Schaal et al. (2004). Right wrist flexion-extension motion 4 types of movements (or actions) (Fig. 1A and 1B) ext flx ext flx ext flx ext flx
Continuous and discrete actions: brain activity patterns • Bilateral activity • Unilateral (contra-) activity Discrete: Discrete-rest: Rhythmic-rest: Rhythmic: Schaal et al. (2004). Figure 2C
Anatomy and function: MRI and PET A. finger flexion B. complex finger sequence