Maximizing Efficiency in Sensor Node Operating Systems
210 likes | 311 Vues
Explore operating systems and software development for network sensors, focusing on cross-compilers, TinyOS concepts, and programming techniques for efficient and robust operation.

Maximizing Efficiency in Sensor Node Operating Systems
E N D
Presentation Transcript
Operating Systems for Sensor Nodes Chih-Chieh Han Simonhan@ee.ucla.edu
Embedded Software Development • Cross-compiler • A compiler which runs on one platform and produces code for another. • Javac: compile java source into java bytecode • Avr-gcc: compile C source into avr instructions • Tool-chain • Compiler + binutils (linker, assembler) + libraries. • Development cycle • Coding • Cross-compile • Upload binary • Testing
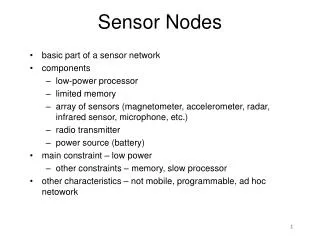
sensors actuators storage network Characteristics of Network Sensors • Small physical size and low power consumption • Concurrency-intensive operation • multiple flows, not wait-command-respond • Limited Physical Parallelism and Controller Hierarchy • primitive direct-to-device interface • Asynchronous and synchronous devices • Diversity in Design and Usage • application specific, not general purpose • huge device variation => efficient modularity => migration across HW/SW boundary • Robust Operation • numerous, unattended, critical => narrow interfaces
msg_rec(type, data) msg_send_done) Tiny OS Concepts • Scheduler + Graph of Components • constrained two-level scheduling model: threads + events • Component: • Commands, • Event Handlers • Frame (storage) • Tasks (concurrency) • Constrained Storage Model • frame per component, shared stack, no heap • Very lean multithreading • Efficient Layering Events Commands send_msg(addr, type, data) power(mode) init Messaging Component internal thread Internal State TX_packet(buf) Power(mode) TX_packet_done (success) init RX_packet_done (buffer)
Application = Graph of Components Route map router sensor appln application Active Messages Serial Packet Radio Packet packet Temp photo SW Example: ad hoc, multi-hop routing of photo sensor readings HW UART Radio byte ADC byte 3450 B code 226 B data clocks RFM bit Graph of cooperating state machines on shared stack
Programming TinyOS • TinyOS 1.0 is written in an extension of C, called nesC • Applications are too! • just additional components composed with the OS components • Provides syntax for TinyOS concurrency and storage model • commands, events, tasks • local frame variable • Rich Compositional Support • separation of definition and linkage • robustness through narrow interfaces and reuse • interpositioning • Whole system analysis and optimization
Event-Driven Sensor Access Pattern command result_t StdControl.start() { return call Timer.start(TIMER_REPEAT, 200); } event result_t Timer.fired() { return call sensor.getData(); } event result_t sensor.dataReady(uint16_t data) { display(data) return SUCCESS; } • clock event handler initiates data collection • sensor signals data ready event • data event handler calls output command • device sleeps or handles other activity while waiting • conservative send/ack at component boundary SENSE LED Photo Timer
{ ... status = call CmdName(args) ... } command CmdName(args) { ... return status; } event EvtName)(args) { ... return status; } { ... status = signal EvtName(args) ... } TinyOS Commands and Events
Tasks events commands Interrupts Hardware TinyOS Execution Contexts • Events generated by interrupts preempt tasks • Tasks do not preempt tasks • Both essential process state transitions
TASKS • provide concurrency internal to a component • longer running operations • are preempted by events • able to perform operations beyond event context • may call commands • may signal events • not preempted by tasks { ... post TskName(); ... } task void TskName { ... }
Components A component specifies a set of interfaces by which it is connected to other components • provides a set of interfaces to others • uses a set of interfaces provided by others • Modules • provide code that implements one or more interfaces and internal behavior • Configurations • link together components to yield new component • Interface • logically related set of commands and events • Interfaces are bi-directional (include commands and events)
provides StdControl Timer Component Leds Clock uses Example Application: Blink module BlinkM { provides { interface StdControl; } uses { interface Clock; interface Leds; } } // Continued next page Clock.nc interface Clock { event result_t fire(); command result_t setRate(char interval, char scale); } StdControl.nc interface StdControl { command result_t init(); command result_t start(); command result_t stop(); }
Module implementation implementation { bool state; command result_t StdControl.init() { state = FALSE; return SUCCESS; } command result_t StdControl.start() { return call Clock.setRate(TOS_I1PS, TOS_S1PS); } command result_t StdControl.stop() { return call Clock.setRate(TOS_I0PS, TOS_S0PS); } event result_t Clock.fire() { state = !state; if (state) call Leds.redOn(); else call Leds.redOff(); return SUCCESS; } }
Main StdControl Blink LedsC ClockC Leds Clock Top level configuration • Configuration wires all components together • Arrows bind interfaces (on the left) to implementation (on the right) configuration Blink { // this module does not provide any interface } implementation { components Main, BlinkM, ClockC, LedsC; Main.StdControl -> BlinkM.StdControl; BlinkM.Clock -> ClockC.Clock; BlinkM.Leds -> LedsC.Leds; }
Compiling, Installing and Running • Compiling: % make mica • Installing: % make mica install • Running: % Live Demo!
PALOS • TinyOS drawbacks • A brand new programming language • No notion of traditional task • PALOS • Written in standard C. • Multi-tasking (Event-Driven) • Each tasks is a routine which processes events that are stored in event queues • Supports Inter-task Communication • By queuing events to other tasks, the data between tasks can be exchanged • Flexible event handling • Handle multiple events or partial events
PALOS Tasks • A task belongs to the palos main control loop • Each task has an entry in palos task table (along with eventQs)
Inter-task Communication • Events are exchanged using the service provided by PALOS core
PALOS example: Blink Task UCHAR myID; StopWatch_Event eventQ[EVENTQ_SIZE]; CHAR Blink(void *ev) { StopWatch_Event *event = (StopWatch_Event *)ev; switch(event->timerID) { case(1): redToggle(); break; case(2): yellowToggle(); StopWatch_Start(myID, 2, TIMER_ONE_SHOT, 5000); break; } return PALOSTASK_DONE; }
PALOS example: Blink Task void globalInitTask(){ SYS_Init(); UART0_Init(); LED_INIT; printf("init\r\n"); myID = palosTask_register(StopWatch_Init, Blink, 0, 0, 0, false, sizeof(StopWatch_Event), EVENTQ_SIZE, (void *)eventQ); } void globalInitSched() { StopWatch_Start(myID, 1, TIMER_REPEAT, 1000); StopWatch_Start(myID, 2, TIMER_ONE_SHOT, 5000); }
References • http://www.tinyos.net/tos/ • http://sourceforge.net/projects/tinyos/ • http://sourceforge.net/projects/palos/