Download
1 / 1
10 likes | 106 Vues
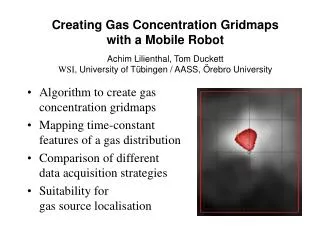
This study explores an algorithm to generate gas concentration gridmaps using a mobile robot. It analyzes mapping time-constant features of gas distribution and compares various data acquisition strategies for suitability in gas source localization.

E N D
Creating Gas Concentration Gridmaps with a Mobile Robot Achim Lilienthal, Tom DuckettWSI, University of Tübingen / AASS, Örebro University • Algorithm to create gas concentration gridmaps • Mapping time-constant features of a gas distribution • Comparison of different data acquisition strategies • Suitability for gas source localisation