Modeling How the Bat, Eptesicus fuscus, Captures Targets Using Echolocation
260 likes | 393 Vues
Modeling How the Bat, Eptesicus fuscus, Captures Targets Using Echolocation. Harry R. Erwin, PhD University of Sunderland School of Computing and Technology. Or “How does the bat do it?”.

Modeling How the Bat, Eptesicus fuscus, Captures Targets Using Echolocation
E N D
Presentation Transcript
Modeling How the Bat, Eptesicus fuscus, Captures Targets Using Echolocation Harry R. Erwin, PhD University of Sunderland School of Computing and Technology
Or “How does the bat do it?” • Results from behavioral and computational research performed with Cynthia F. Moss, Ph.D., at the the Auditory Neuroethology Laboratory, Department of Psychology, University of Maryland, College Park. • With thanks to Willard Wilson, Peter Abrams, Myriam Tron, Amy Kryjak, and Paul Kelley.
The basic problem: how the bat captures prey using echolocation • Figure from Webster and Brazier, Experimental Studies on Target Detection, Evaluation and Interception by Echo-locating Bats , 1965 • A bat (Myotis lucifugus) capturing a moth in foliage. • 100 millisecond intervals • The bat had first detected the tree about 500 milliseconds before the first image. • Data available to the bat—a few biosonar snapshots in the dark.
Some hints: Erstorientierung and Wiederorientierung • Reported by Möhres and Öttingen-Spielberg in 1949. Erstorientierung—when bats first encounter a novel situation. Wiederorientierung—when bats fly in a familiar space. • First observed in the behavior of a bat that was accustomed to roosting in a cage in a room. The researchers rotated the cage and eventually removed it, and noted that the bat continued to behave as if the cage were in its normal position until forced to reorient. • This is evidence that a bat may use and maintain a world model that is only modified if circumstances force it to.
Follow-up: Listening in the dark • Rawson and Griffin investigated this further (see Griffin, Listening in the dark, the Acoustic Orientation of Bats and Men, Yale, 1958, and Griffin, “Cognitive aspects of echolocation,” in Nachtigall and Moore, ed., Animal Sonar: Processes and Performance, Plenum Press, 1988). • Asked whether the bats even called when they were dead-reckoning. • Experiment involved placing and moving obstacles in a flight room. • Answer: the bat still called, but seemed to ignore the resulting returns. • More recent evidence suggests echolocation has no cost for bats in flight (Speakman and Racey, Nature, 350:421-423, 4 April 1991)
Our research goal: To understand sensory-motor integration in bat • Using static targets, first answer: • What localization cues does the bat use? • What flight control algorithm does the bat use? • What else has to modeled accurately? • Then, using moving targets address: • Is the capture planning algorithm predictive or non-predictive? • And characterize the capture planning algorithm.
Predictive versus non-predictive • Predictive: use models of the target’s motion and of the bat’s self-motion to control the capture process • Non-Predictive: use current state estimates to control the capture process • Simple homing • Lead pursuit • Lag pursuit
Sensory Processing Motor Responses Motor Planning Target Position Acoustics A gray-box model of bat echolocation and target capture • Founded on work (Kuc 95) in sonar-controlled robotics, but with more biological realism. • Uses non-predictive control and assumes a stationary target (a = 1.0 and b = 0.0 for an a/b tracking filter) • Realistic aerodynamic models • Calibrated from behavioral trial data • Model behavior based on a world model updated asynchronously by the echolocation of targets of interest.
Why not a neural model? • Detailed neuroanatomy was unknown. • Detailed neurophysiology was unknown. • Computational cost of modeling a large network was unacceptably large. • Experimental work to validate a network model was unacceptably large.
How target position was estimated • Range from echo delay time. • Azimuth by comparing intensity in the two ears. • Elevation was more difficult…
Problems in estimating elevation • Traditional (in the literature) “narrowband” approaches—using intensity samples taken at a small number of frequencies—failed. • Back-propagation approach failed—the acoustic scene was too complex. • Elevation estimates were necessary to replicate the observed behavior. • Finally, a “wideband” match/mismatch process— using spectral intensity measurements—was successful.
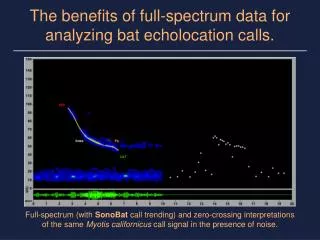
Why?— the intensity spectra of returns at 0 degrees azimuth 20 kHz 80 kHz +50 Elevation -70 Frequency The notch From Wotton, Jenison, and Hartley, 1997
Programming the wideband approach for vertical localization • Build a library of comparison spectra, measured at 1 kHz intervals between 20 and 80 kHz, each spectrum matching an elevation. This was done at the start of each modeling run. • Take wide-band spectral measurements in each ear, average and normalize them. • Select the elevation that matched most closely in the L2 norm (i.e., winner-take-all).
How the corresponding neural system might work • Use a continuous distribution of comparison patterns across a neural module, from high elevation down to low elevation. • Reafference is then applied to steer the module to attend to a specific region in space in a “predictor/corrector” system. • The signal is matched to all comparison patterns in parallel as part of a winner-take-all process.
This was motivated by work at Curtis Bell’s lab • Evidence for negative images in cerebellum-like structures of the brain that participate in a match/mismatch process. • Curtis C Bell, Angel Caputi and Kirsty Grant, 1997, “Physiology and Plasticity of Morphologically Identified Cells in the Mormyrid Electrosensory Lobe”, Journal of Neuroscience, 17:6409--6423. • Curtis C Bell, Victor Z Han and Yoshiko Sugawara and Kirsty Grant, 1997, “Synaptic plasticity in a cerebellum-like structure depends on temporal order”, Nature, 387:278--281. • Curtis C Bell, D Bodznick, J Montgomery and J Bastian, 1997, “The Generation and Subtraction of Sensory Expectations within Cerebellum-Like Structures”, Brain, Behavior and Evolution, 50:17–31.
Model performance with a stationary target Top view of trajectories Scale in meters
Localization is three-dimensional, using range, azimuth and elevation cues Capture behavior is more than simple homing—the bat seems to maneuver for a good position to perform a homing capture Aerodynamics are important Trajectories were sensitively dependent on when targets were detected and decisions made. Conclusions from stationary targets
Actual performance of a bat capturing a moving target Top view
Performance of a non-predictive algorithm with moving target Top view General case Shows that the bat was using predictive tracking
Improved performance after implementation of a Benedict-Bordner fixed weight tracking filter Top view Predicts future position This approach generally performed well but usually not as good as shown here. b = a2/(2.0 - a)
Models explored • Non-predictive • Fixed-weight predictive (estimates position and velocity) • Kalman filter (variable weight) • Curve fitting model. Assumes the bat learns the motion (including acceleration) and matches the target measurements to what it has learned to allow it to predict the future target location
Some evidence for tracking in acceleration—side view Length of acoustic recording: 8 sec Length of video recording: 2.7 sec Markers indicate the bat and target locations at the times when the bat vocalized.
Evidence for tracking in acceleration—top view These bats produce a ‘terminal buzz’—a series of short cries emitted at about 5-10 msec intervals as they approach landing or targets. It is theorized that it is triggered on the basis of range. This bat produced the abortive terminal buzz at an unusually long range (0.6 m). Markers are at positions when the bat vocalized.
Typical performance The large minimum distance to target seen here (about 0.10 m) was typical of all but the curve-fitting model. This suggests that the bat was taking account of target acceleration in its control algorithm.
Conclusions and research directions • Alpha/beta filter clearly inadequate as a model. • Fixed and variable weight tracking filters appear unlikely • In particular, Kalman filters are computationally expensive, involving matrix inversion, and handle non-linearity poorly. • Kalman filtering of echolocation cues is known to bias the resulting localization. • Learning-based pattern recognition, using innate models, previous experience, and observations to predict the location of the target at capture, performed best. • Now exploring the use of implicit neural models where the bat has learned where to fly and does not have an explicit representation of the target.