Tekkotsu: Advancing Aibo Robotics Through Open Source Innovation
Tekkotsu is a collaborative open-source framework aimed at developing a versatile research platform for Aibo robots. With the goal of lowering barriers for new programmers and encouraging hobbyists to transition into developers, Tekkotsu fosters rapid development and real-time performance optimization. Released in March 2003, it supports features like vision processing, wireless interfaces, and modular architecture. Future developments include advanced localization techniques and learning models, enabling Aibos to train just like real dogs. Join the community and explore the potential of Aibo robotics with Tekkotsu.


Tekkotsu: Advancing Aibo Robotics Through Open Source Innovation
E N D
Presentation Transcript
Robotics Application Framework tekkotsu.org
Goals • Develop a common research platform for the Aibo • Reduce barrier to entry for new Aibo programmers • Encourage hobbyists to become developers
Open Source Model • Why start a new code base? • RoboCup competition is good... • Drives rapid development • Optimizes real-time performance • ...and bad • Source is “closed” for most of the year • Single task causes specialization
Open Source Model • Our answer: Tekkotsu • First release March 4, 2003 • Three releases in first two months • New features released as soon as they are ready • Support for cygwin and ERS-220 contributed by one of our users
Out of the Box • Vision processing (uses CMVision) • Wireless interfaces • Motion primitives • Walk (from CMPack), poser, keyframed playback, emergency stop, etc. • Mapping and localization • Sound Playback (with mixing)
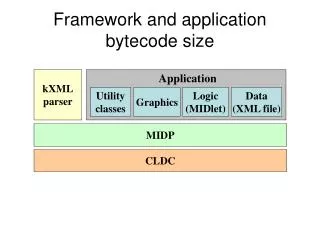
Architectural Overview • 3 processes: Main, Motion, Sound • Event-based interface; no polling • Flexible state machine formalism • Modular “plug-and-play” organization • Utility functions: timers, mutex, event logging, profiling • Online documentation & tutorials
Remote Monitoring • Raw and color-segmented video • Full 25 frames per second over wireless
Teleoperation (coming soon)
Joint Monitoring Joint position and force graphs
Future Development • FastSLAM for Aibo • Simultaneous Localization And Mapping(Montemerlo et al.) • Efficient particle filtering technique • Allows the robot to track position in a relatively unstructured environment
Future Development • New representations for behaviors • Hierarchical state machines • Automated problem solving through keyframe based task descriptions • Visual routines for parsing world maps • New animal learning models • Train Aibos just like real dogs
Credits • Tekkotsu developers • Ethan Tira-Thompson, Alok Ladsariya, Tom Stepleton, Neil Halelamien, David Touretzky at Carnegie Mellon University • Funded by Sony Corporation • Thanks to Manuela Veloso and her Robosoccer group for use of their CMPack’02 code tekkotsu.org