Adaptive Architectures for Efficient Team Coordination
Explore domain-specific and adaptation goals in team coordination, with emphasis on architectural styles and knowledge representation for effective communication and fault tolerance. Learn about adapting robots and application logic to achieve specific objectives.

Adaptive Architectures for Efficient Team Coordination
E N D
Presentation Transcript
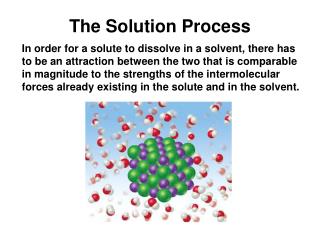
The solution The better team (Sam, Nedeljko, Carlos, Thomas, Regina, Naeem)
What are the types of adaptations? • Two types of adaptation 1) Domain-specific (application-specific) • Reassignment of robots to different teams • If a leader crashes, another leader is selected 2) Updating the application logic of the robot • Instead of organizing the chairs in a room, vacuum the room • When a software component deployed on a robot crashes, re-instantiate it
What are the goals? • Domain-specific goals • Setup the room as fast as possible • Setup the room as clean as possible • Adaptation goals • Depend on domain-specific goals • Fix (re-instantiate) a failed software component on a robot as fast as possible • Conflicting goals are handled through utility functions
The general architectural style • Setup feedback control loops and coordination/communication mechanisms that are • Hierarchical • Scalability of communication and control • Peer-to-peer within each layer of the hierarchy • Fault-tolerance, robustness, etc. • Regularity principles • Roles: leaders, slaves, etc. • Communication follows the structure of organization • Recursively hierarchical • The number of layers is itself a tunable parameter
How to represent knowledge? • A cyber-physical model of • Rooms, robots, chairs, status of those elements, etc. • Consistency • Broadcasting state to all members within each group • Leader selectively shares appropriate info with other leaders • Guarantee • If a leader dies, another group member becomes the leader without losing state