Download
1 / 1
10 likes | 181 Vues
YES U CAN – ADAPTIVE CYCLING University of Delaware , Department of Biomedical & Mechanical Engineering, Newark, DE Team Members: Brendan Farrell, David Huegel, Shane Kelly, Zack Rogers, Laura van der Post Advisors : Dr. Steve Timmins & Dr. Jennifer Buckley. Want/Need. Metric.

E N D
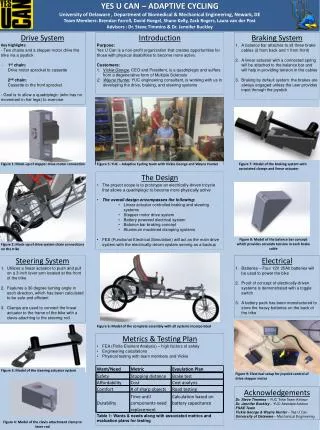
YES U CAN – ADAPTIVE CYCLING University of Delaware , Department of Biomedical & Mechanical Engineering, Newark, DE Team Members: Brendan Farrell, David Huegel, Shane Kelly, Zack Rogers, Laura van der Post Advisors : Dr. Steve Timmins & Dr. Jennifer Buckley Want/Need Metric Evaulation Plan Safety Stopping distance Brake test Affordability Cost Cost analysis Comfort # of sharp objects Road testing Time until Calculation based on Durability components need battery capacitance replacement Drive System Key Highlights: - Two chains and a stepper motor drive the trike via a joystick - 1st chain: Drive motor sprocket to cassette 2nd chain: Cassette to the front sprocket - Goal is to allow a quadriplegic (who has no movement in her legs) to exercise Introduction Purpose: Yes U Can is a non-profit organization that creates opportunities for those with physical disabilities to become more active. Customers: Vickie George, CEO and President, is a quadriplegic and suffers from a degenerative form of Multiple Sclerosis Wayne Hunter, YUC engineering consultant, is working with us in developing the drive, braking, and steering systems Braking System A balance bar attaches to all three brake cables (2 from back and 1 from front) A linear actuator with a connected spring will be attached to the balance bar and will help in providing tension in the cables Braking by default system: the brakes are always engaged unless the user provides input through the joystick Figure 1: Mock-up of stepper drive motor connection Figure 5: YUC – Adaptive Cycling team with Vickie George and Wayne Hunter Figure 7: Model of the braking system with associated clamps and linear actuator • The Design • The project scope is to prototype an electrically-driven tricycle that allows a quadriplegic to become more physically active • The overall design encompasses the following: • Linear actuator controlled braking and steering systems • Stepper motor drive system • Battery powered electrical system • Balance bar braking concept • Aluminum machined clamping systems • FES (Functional Electrical Stimulation) will act as the main drive system with the electrically-driven system serving as a backup Figure 8: Model of the balance bar concept which provides accurate tension in each brake cable Figure 2: Mock-up of drive system chain connections on the trike Steering System Utilizes a linear actuator to push and pull on a 3 inch lever arm located at the front of the trike Features a 30 degree turning angle in each direction, which has been calculated to be safe and efficient Clamps are used to connect the linear actuator to the frame of the bike with a clevis attaching to the steering rod Electrical Batteries – Four 12V 35Ah batteries will be used to power the bike Proof of concept of electrically-driven systems is demonstrated with a toggle switch A battery pack has been manufactured to store the heavy batteries on the back of the trike Figure 6: Model of the complete assembly with all systems incorporated • Metrics & Testing Plan • FEA (Finite Element Analysis) – high factors of safety • Engineering calculations • Physical testing with team members and Vickie • Table 1: Wants & needs along with associated metrics and evaluation plans for testing Figure 3: Model of the steering actuator system Figure 9: Electrical setup for joystick control of drive stepper motor Acknowledgements Dr. Steve Timmins – YUC Trike Team Advisor Dr. Jennifer Buckley – YUC Assistant Advisor FSAE Team Vickie George & Wayne Hunter – Yes U Can University of Delaware – Mechanical Engineering Figure 4: Model of the clevis attachment clamp to lever rod




![Planning Adaptive Interfaces [RWD Summit 2016]](https://cdn4.slideserve.com/7568466/planning-adaptive-interfaces-dt.jpg)