Download
1 / 12
120 likes | 350 Vues
K waterniony. jako nośniki obrotu. Piotr Orzechowski aero@priv.ckp.pl. Poszukiwania uniwersalnego sposobu na reprezentację obrotów w 3D …. „ … uogólnienie liczb zespolonych ? ” Sir William Rowan Hamilton. Notacja macierzowa kwaternionu. czyli :.

E N D
Kwaterniony jako nośniki obrotu Piotr Orzechowski aero@priv.ckp.pl
Poszukiwania uniwersalnego sposobu na reprezentację obrotów w 3D … „ … uogólnienie liczb zespolonych ? ” Sir William Rowan Hamilton
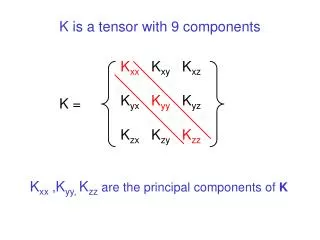
Notacja macierzowa kwaternionu czyli :
Definiujemy macierze i, j, k : Ponadto dla dowolnej liczby rzeczywistej r :
Notacja kwaternionu przy pomocy pary :liczby rzeczywistej i trójwymiarowego wektora współczynników części urojonej czyli
Osiowo-kątowa reprezentacja obrotu • Każda seria obrotów może być opisana przez pojedynczy obrót wokół osi. • Kwaternion = kąt + oś obrotu (!) … reprezentuje obrót, gdy : =
Odwrotność kwaternionu • W przypadku jednostkowych kwaternionów reprezentujących obrót osiowo-kątowy : Poprzez negację wektora v zmieniamy zwrot osi obrotu n, co powoduje odwrócenie kierunku obrotu, który uważamy za ‘dodatni’.
Mnożenie Główne własności mnożenia :
Obrót wektora w R3 * Punkt a o współrzędnych (x, y, z) p = [ 0 (x, y, z) ] * q = Kwaterniony - są nośnikami obrotu! :D
Kwaterniony w grafice komputerowej Główne zalety : • Prosta modyfikacja i szybkie łączenie obrotów • Szybka inwersja obrotów • Unikanie kosztownych normalizacji • Tylko cztery liczby (małe zużycie pamięci) • Płynna konwersja z/do macierzy obrotu • Płynna interpolacja obrotów





![Dictée for Week 15 [ c = k , qu = k , k = k ]](https://cdn2.slideserve.com/5052370/dict-e-for-week-15-c-k-qu-k-k-k-dt.jpg)