Download
1 / 10
160 likes | 758 Vues
Chapter 6 Plane Kinematics of Rigid Bodies. Rigid body: A body (system) is so rigid such that the relative positions of all the mass elements do not change during motion. q ( angular displacement). = angular velocity. = angular acceleration. .

E N D
Chapter 6 Plane Kinematics of Rigid Bodies Rigid body: A body (system) is so rigid such that the relative positions of all the mass elements do not change during motion.
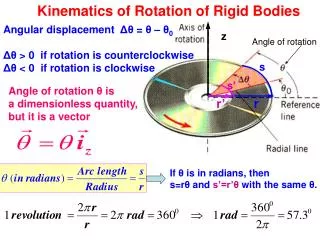
q (angular displacement) = angular velocity = angular acceleration
Velocity of a point P relative to another point O with a fixed distance from P (could be a fixed point in a rigid body. • Direction defined by Right Hand Rule. P
Acceleration of a point P relative to another point O with a fixed distance from P. Exercise Prove that the above statement is identical to:
Example : Draw a vector diagram to show the relation between Relative motion of two points of a fixed separation (i.e. on a rigid plane):
Instantaneous Centre of zero velocity Draw two lines perpendicular to the velocities of points A and B of a rigid body. Their intercept is an instantaneous stationary point (zero velocity).
Example : For pure rolling without slipping, derive y Let s = 00’ = r (c) For the new position C' from C : x = s - rsin and y = r - rcos x when = 0, vc = 0 (d) when = 0,
Example A wheel has a radius R = 0.3 m. Point P is 0.2 m from the centre O, which is moving with vo = 3 m/s. Find . Solution:
X B C D h A y x Example : The structure has the following dimensions: rB/A = 0.1 m, rC/D = 0.075 m, h = 0.05 m,X = 0.25 m. CD = 2 rad/s. Find : AB , BC