Download
1 / 1
10 likes | 117 Vues
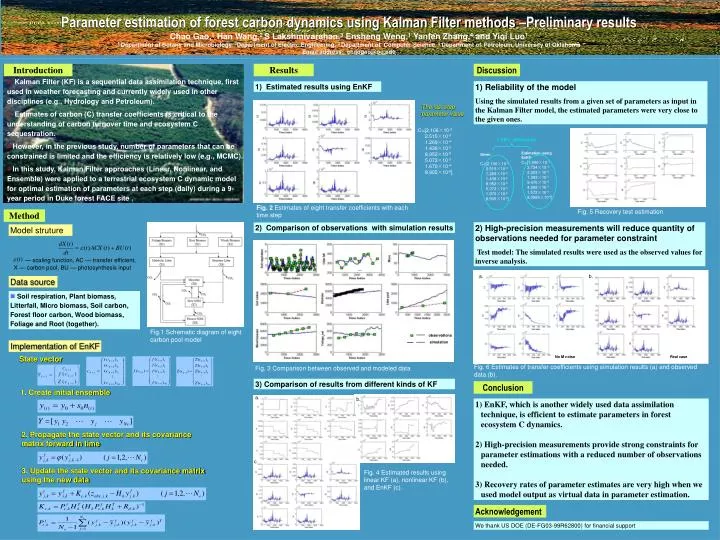
This study investigates the application of Kalman Filter methods—linear, nonlinear, and ensemble techniques—to estimate parameters related to carbon dynamics in a terrestrial ecosystem over a nine-year period at the Duke Forest FACE site. Kalman Filter approaches provide efficient parameter estimation, enhancing our understanding of carbon turnover and ecosystem sequestration. Results indicate high accuracy in parameter recovery, demonstrating the effectiveness of these methods for ecological modeling and underscoring the importance of high-precision measurements in the estimation process.

E N D
No M noise Real case Fig. 4 Estimated results using linear KF (a), nonlinear KF (b), and EnKF (c). Parameter estimation of forest carbon dynamics using Kalman Filter methods –Preliminary results Chao Gao,1 Han Wang,2 S Lakshmivarahan,3 Ensheng Weng,1 Yanfen Zhang,4 and Yiqi Luo1 1 Department of Botany and Microbiology, 2Department of Electric Engineering, 3 Department of Computer Science, 4 Department of Petroleum,University of Oklahoma Email address: chaogao@ou.edu Introduction Results Discussion • Kalman Filter (KF) is a sequential data assimilation technique, first used in weather forecasting and currently widely used in other disciplines (e.g., Hydrology and Petroleum). • Estimates of carbon (C) transfer coefficients is critical to the understanding of carbon turnover time and ecosystem C sequestration. • However, in the previous study, number of parameters that can be constrained is limited and the efficiency is relatively low (e.g., MCMC). • In this study, Kalman Filter approaches (Linear, Nonlinear, and Ensemble) were applied to a terrestrial ecosystem C dynamic model for optimal estimation of parameters at each step (daily) during a 9-year period in Duke forest FACE site. 1) Reliability of the model Using the simulated results from a given set of parameters as input in the Kalman Filter model, the estimated parameters were very close to the given ones. 1) Estimated results using EnKF The last step parameter value C=[2.106×10-3 2.515×10-3 1.269×10-4 1.438×10-2 8.952×10-5 5.073×10-3 1.670×10-4 8.905×10-6] 1.38% difference Estimation using EnKF C=[1.946×10-3 2.734×10-3 2.303×10-4 1.383×10-2 9.475×10-5 4.992×10-3 1.572×10-4 8.0985×10-6] Given C=[2.106×10-3 2.515×10-3 1.269×10-4 1.438×10-2 8.952×10-5 5.073×10-3 1.670×10-4 8.905×10-6] Fig. 2 Estimates of eight transfer coefficients with each time step Fig. 5 Recovery test estimation Method 2) High-precision measurements will reduce quantity of observations needed for parameter constraint Test model: The simulated results were used as the observed values for inverse analysis. 2) Comparison of observations with simulation results Model struture — scaling function, AC — transfer efficient, X — carbon pool, BU — photosynthesis input — a. b. Data source • Soil respiration, Plant biomass, Litterfall, Micro biomass, Soil carbon, Forest floor carbon, Wood biomass, Foliage and Root (together). Fig.1 Schematic diagram of eight carbon pool model observations simulation Implementation of EnKF State vector Fig. 6 Estimates of transfer coefficients using simulation results (a) and observed data (b). Fig. 3 Comparison between observed and modeled data 3) Comparison of results from different kinds of KF Conclusion 1. Create initial ensemble a. b. 1) EnKF, which is another widely used data assimilation technique, is efficient to estimate parameters in forest ecosystem C dynamics. 2) High-precision measurements provide strong constraints for parameter estimations with a reduced number of observations needed. 3) Recovery rates of parameter estimates are very high when we used model output as virtual data in parameter estimation. 2. Propagate the state vector and its covariance matrix forward in time c. 3. Update the state vector and its covariance matrix using the new data Acknowledgement We thank US DOE (DE-FG03-99R62800) for financial support