Download
1 / 6
60 likes | 175 Vues
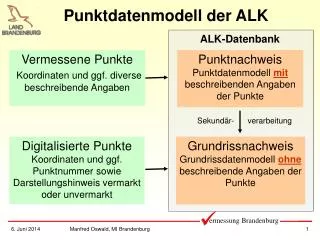
Transformation (Umformung rechtwinkliger Koordinaten). Als Transformation bezeichnet man die Überführung von rechtwinkligen Koordinaten (Quellsystem) in ein anderes Koordinatensystem (Zielsystem) Beispiel: Örtliche Koordinaten (Quellsystem) Gauß-Krüger Koordinaten (Zielsystem)

E N D
Transformation (Umformung rechtwinkliger Koordinaten) Als Transformation bezeichnet man die Überführung von rechtwinkligen Koordinaten (Quellsystem) in ein anderes Koordinatensystem (Zielsystem) Beispiel: Örtliche Koordinaten (Quellsystem) Gauß-Krüger Koordinaten (Zielsystem) Notwendig sind mindestens zwei identische Punkte in beiden Systemen, d.h., es müssen für mindestens zwei Punkte in beiden Systemen Koordinaten gegeben sein. Folgende Bezeichnungen sind auch üblich: Quellsystem : Altes System Zielsystem : Neues System Identische Punkte : Stützpunkte
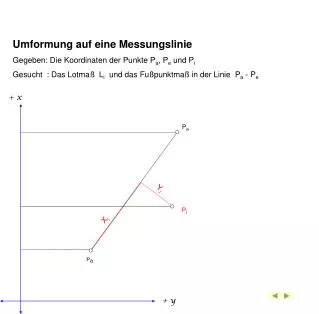
Gegeben : Koordinaten von Pa, Pe und Pi im Quellsystem und Pa und Pe im Zielsystem Gesucht : Koordinaten von Pi im Zielsystem Gegebene Koordinaten im Quellsystem Gegebene Koordinaten im Zielsystem + X + x Gesuchte Koordinate im Zielsystem Pe Pi Pa + y + Y
Einpassen des Quellsystems in das Zielsystem Der Punkt Pa des Quellsystems wird in den Punkt Pa des Zielsystems verschoben und die Strecke Pa – Pe des Quellsystems um den Winkel a gedreht. Alle Punkte Pi des Quellsystems machen diese Parallelverschiebung und die Drehung um den Winkel amit. Mit Hilfe eines Maßstabsfaktors kann nach der Drehung des Punkt Pe des Quellsy-stems mit dem Punkt Pe des Zielsystems zur Deckung gebracht werden. + X + x Pe Pi a Pa + y + Y
Berechnung des Drehwinkels a und des Maßstabsfaktors m aus den Koordinaten der identischen Punkte im Quell- und Zielsystem + X + x D y = ye - ya Pe Dx = xe - xa DY = Ye - Ya DX = Xe - Xa t a T Pa +y
Berechnung der Koordinaten im Zielsystem + X + x Pe D x=(xi – xa) D y=(yi – ya) ti D Yi Pi a si D Xi Ti Pa + y + Y
Zusammenfassung: Die Berechnung sollte programmgesteuert durchgeführt werden. Diese Formelableitung soll in erster Linie das Verständnis für die Transformation wecken.